



I. Introduction▲
I2C est le sigle d'Inter-Integrated Circuit. à la fin des annÃĐes 1970, la division des semi-conducteurs de chez Philips (maintenant devenue NXP) avait vu la nÃĐcessitÃĐ de simplifier et standardiser les ÃĐchanges de donnÃĐes entre les diffÃĐrents circuits intÃĐgrÃĐs dans leurs produits. Leur solution fut le bus I2C, elle rÃĐduisait le nombre de lignes nÃĐcessaires à seulement deux lignes, SDA - Serial DAta, et SCL - Serial CLock.
Dans ce tutoriel, nous allons dÃĐcrire l'architecture physique du bus I2C, le protocole de communication sÃĐrie et comment communiquer en I2C entre une carte Arduino et un capteur de tempÃĐrature DS1621.

II. Le bus I2C▲
C'est donc maintenant chez le fabricant de semi-conducteurs NXP que vous trouverez les spÃĐcifications de la norme I2C.
à l'origine, la communication ÃĐtait limitÃĐe à la vitesse de transfert de 100 kbit/s, et cela suffisait dans la majoritÃĐ des cas. Pour des dÃĐbits plus rapides, de nouvelles spÃĐcifications sont nÃĐes. D'abord un Fast Mode à 400 kbit/s, puis un Fast Mode plus (FM+) à 1 Mbit/s. Depuis 1998, il y a une version High Speed à 3,4 Mbit/s. Le dÃĐbit maximal possible via un bus I2C est spÃĐcifiÃĐ dans l'Ultra Fast mode à 5 Mbit/s, mais avec un fonctionnement un peu particulier.
CaractÃĐristiques principales du bus I2CÂ :
- seulement deux lignes (bidirectionnelles) sont nÃĐcessaires, une pour transporter les donnÃĐes - SDA -, une autre pour l'horloge de synchronisation - SCK - (1 bit ÃĐchangÃĐ Ã chaque ÂŦ coup Âŧ d'horloge) ;
- transmission synchrone. Pas besoin de spÃĐcifier une vitesse de transfert comme pour la liaison RS232. Ici, le pÃĐriphÃĐrique maÃŪtre (master) gÃĐnÃĻre le signal d'horloge qui synchronise et cadence les ÃĐchanges ;
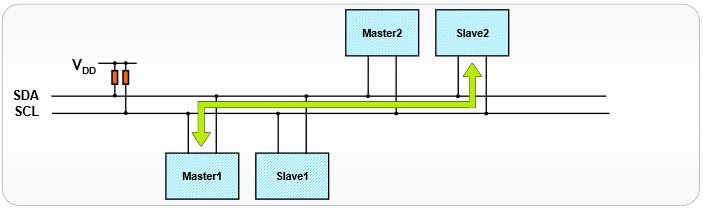
- la relation entre les pÃĐriphÃĐriques du bus est de type maÃŪtre-esclave (master/slave). Le maÃŪtre est à l'initiative de la transmission et s'adresse à un esclave (ou tous les esclaves) ;
- chaque pÃĐriphÃĐrique sur le bus I2C est adressable, avec une adresse unique pour chaque pÃĐriphÃĐrique du bus ;
- l'I2C gÃĻre le fonctionnement multimaÃŪtre (multi-master), plusieurs pÃĐriphÃĐriques maÃŪtres peuvent prendre simultanÃĐment le contrÃīle du bus (systÃĻme d'arbitrage des maÃŪtres et gestion des collisions).
III. Pourquoi utiliser des pÃĐriphÃĐriques I2CÂ ?▲
Il y a des milliers de composants qui utilisent une interface I2C, et les cartes de la famille Arduino peuvent toutes les contrÃīler. Les applications sont multiples : horloges temps rÃĐel, potentiomÃĻtres numÃĐriques, capteurs de tempÃĐrature, boussoles numÃĐriques, mÃĐmoires, circuits radio FM, cartes d'extension d'entrÃĐes-sorties, contrÃīleurs d'afficheur LCD, accÃĐlÃĐromÃĻtres, amplificateurs et bien d'autres encore. Vous pouvez connecter plusieurs composants adressables sur un mÊme bus à tout moment (jusqu'à 112 pÃĐriphÃĐriques I2C adressables sur un mÊme bus en thÃĐorie).
Quelques composants et modules bien utiles avec une interface I2CÂ :
|
Composants I2C compatibles Arduino |
Description |
|
Le capteur de tempÃĐrature et thermostat DS1621 (Maxim Integrated), objet de ce tutoriel. |

|
|
MÃĐmoire morte EEPROM - 256 Kbit (RÃĐf. 24LC256 Microchip) |

|
|
Module Horloge temps rÃĐel (Real Time Clock) Ã base de DS1307 (Maxim Integrated). |

|
|
Module de conversion NumÃĐrique-Analogique (Digital-to-Analog Converter) Ã base de MCP4725 (Microchip). |

|
|
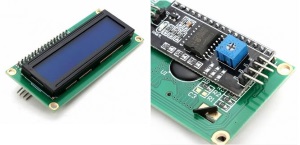
Module d'interface I2C pour ÃĐcran LCD |
|
|
Circuit d'extension EntrÃĐe-Sortie à base de PCF8575 (NXP) |

|
IV. I2C et Arduino▲
En ce qui concerne l'architecture matÃĐrielle, le cÃĒblage est trÃĻs simple. Ceux qui disposent de l'Arduino Uno ou d'une carte compatible utiliseront les connecteurs A4 pour SDA (les donnÃĐes) et A5 pour SCL (l'horloge)Â :
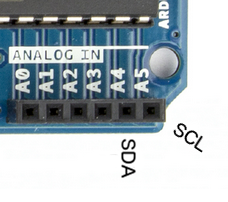
Si vous utilisez une carte Arduino Mega, SDA est sur le connecteur 20 et SCL sur le connecteur 21. Si vous voulez connecter un shield Arduino avec une interface I2C, vÃĐrifiez bien sa compatibilitÃĐ avec l'Arduino Mega. Pour les autres types de cartes, il faudra consulter la fiche technique (data sheet) ou se renseigner sur le site de la communautÃĐ Arduino. Finalement, si vous interfacez directement le microcontrÃīleur ATmega328-PU dans son boÃŪtier DIP, vous utiliserez les pattes 27 pour SDA et 28 pour SCL.
L'architecture du bus est simple, ici avec deux pÃĐriphÃĐriques sur le bus I2CÂ :
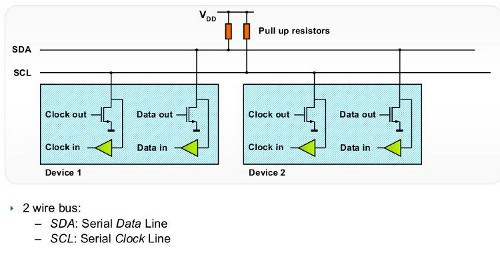
Avec un seul ÃĐquipement I2C connectÃĐ Ã l'Arduino, les rÃĐsistances de tirage au plus (pull-up resistors) ne sont pas (normalement) requises, car le microcontrÃīleur ATmega328 de l'Arduino les intÃĻgre dÃĐjà . Si plusieurs ÃĐquipements sont connectÃĐs au bus, utilisez deux rÃĐsistances de 10 kÎĐ chacune. Comme souvent, ce sont les tests que vous effectuerez en prototypant un circuit sur une plaquette de cÃĒblage rapide que vous jugerez de leur nÃĐcessitÃĐ. Parfois, dans les fiches techniques (datasheets), vous trouverez d'autres valeurs de rÃĐsistance, du 4,7 kÎĐ par exemple. Dans ce cas, suivez les recommandations du constructeur.
La distance maximale maÃŪtre-esclave pour un bus I2C est d'environ un mÃĻtre et dÃĐpend de plusieurs facteurs comme la capacitÃĐ ÃĐlectrique du bus ou le dÃĐbit de transmission. Cette distance peut Être sensiblement augmentÃĐe en passant par des interfaces spÃĐcifiques (un i2c-bus extender amplifie le courant dÃĐbitÃĐ par les broches SDA et SCL, ce qui augmente la portÃĐe du signal).
Chaque ÃĐquipement peut Être connectÃĐ au bus dans n'importe quel ordre, et certains ÃĐquipements peuvent mÊme passer du statut de maÃŪtre à esclave et inversement. Dans ce tutoriel, la carte Arduino sera dans la situation du maÃŪtre et le composant connectÃĐ au bus I2C sera en situation d'esclave. De l'Arduino, on peut ÂŦ ÃĐcrire Âŧ sur la ligne pour envoyer des donnÃĐes vers un composant, ou ÂŦ lire Âŧ la ligne pour rÃĐcupÃĐrer les donnÃĐes retournÃĐes par celui-ci.
Se pose maintenant la question de savoir comment diffÃĐrencier les composants connectÃĐs sur le bus. En fait, chacun d'entre eux doit possÃĐder une adresse unique, fixÃĐe par le constructeur et parfois configurable. Cette adresse sera utilisÃĐe pour ÃĐcrire ou lire les donnÃĐes vers le composant souhaitÃĐ.
Pour communiquer en suivant le protocole I2C, on inclura une bibliothÃĻque Arduino dans les croquis, ici nommÃĐe Wire, avec un #include <Wire.h>. Puis on l'initialisera avec Wire.begin() Ã l'intÃĐrieur du void setup().
V. Exemple d'application : le capteur de tempÃĐrature DS1621▲
V-A. PrÃĐsentation du composant▲
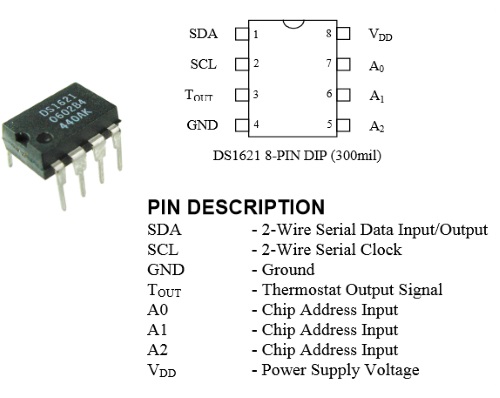
Le DS1621 de Maxim Integrated apporte à la fois des fonctionnalitÃĐs de thermomÃĻtre et de thermostat dans une puce au format DIP 8 broches, bien pratique pour faire un prototype sur une plaquette de cÃĒblage sans soudure.
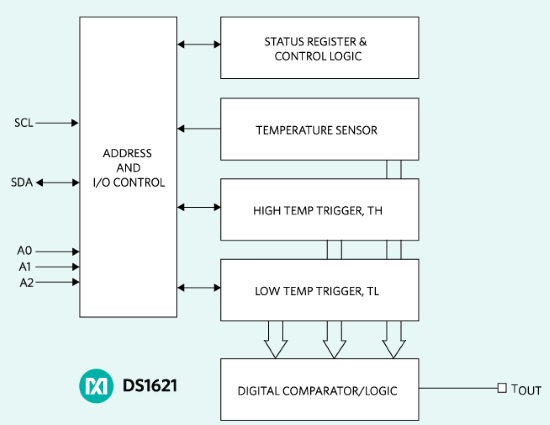
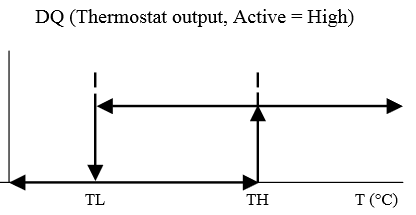
Ce composant intÃĻgre toute la chaÃŪne de traitement, de l'acquisition de la tempÃĐrature en analogique jusqu'à la conversion numÃĐrique en mot de 16 bits. Il suffit alors d'aller consulter les registres internes selon le protocole I2C pour rÃĐcupÃĐrer la tempÃĐrature. On peut aussi configurer le DS1621 comme un thermostat avec une sortie Tout qui peut changer d'ÃĐtat logique lorsque la tempÃĐrature passe en deçà d'un seuil bas (TL), ou au-delà d'un seuil haut (TH).
V-B. Branchements▲
Relier le DS1621 à une Arduino Uno ne prÃĐsente pas de difficultÃĐs. Une plaquette de cÃĒblage rapide et quelques fils suffiront. On rappelle que les rÃĐsistances pull-up ne sont pas indispensables ici puisqu'intÃĐgrÃĐes à la carte Arduino.

Les broches SDA et SDL du DS1621 sont connectÃĐes respectivement aux connecteurs A4 et A5 de l'Arduino Uno. On alimente le composant avec les broches GND et VDD reliÃĐes respectivement aux connecteurs GND et 5V de l'Arduino Uno.
On rappelle que l'adresse d'un composant I2C est codÃĐe avec sept bits (A0 à A6). Les bits de poids faible A0, A1 et A2 peuvent Être configurÃĐs matÃĐriellement, par exemple en reliant les trois broches A0, A1 et A2 à la rÃĐfÃĐrence ÃĐlectrique GND comme sur le schÃĐma du montage ci-dessus, on les met au niveau logique bas, A0 = A1 = A2 =0. Les bits A3 à A6 sont fixÃĐs par le fabricant du DS1621, ici A3=1, A4=0, A5=0 et A6=1.
Ce qui donne pour l'adresse du composant : 100 1000 = 48Hex
Les bits A0, A1 et A2 pouvant Être configurÃĐs matÃĐriellement, le fabricant offre la possibilitÃĐ d'adresser huit DS1621 sur un mÊme bus.
V-C. Comment envoyer des donnÃĐes▲
ÂŦ Ãcrire Âŧ sur la ligne pour envoyer des donnÃĐes de l'Arduino (maÃŪtre) vers un composant I2C (esclave) requiert deux choses : l'adresse du composant qui doit Être unique sur le bus, et le ou les octets de donnÃĐes à envoyer. Dans le cas de notre DS1621, l'adresse du capteur numÃĐrique est fixÃĐe à 48 en hexadÃĐcimal.
Par exemple, pour lancer une conversion de tempÃĐrature, on procÃĻde en trois temps :
Wire.beginTransmission(0x48); // adresse du DS1621L'adresse est alors ÃĐcrite sur la ligne de donnÃĐes SDA du bus, ce qui, en quelque sorte, va notifier le composant concernÃĐ que des donnÃĐes vont lui Être adressÃĐesâĶ
Wire.write(0xEE); // 0xEE est la commande Start Convert TL'octet de donnÃĐes (ici, la commande Start Convert [0xEE] qui permet de lancer la conversion de tempÃĐrature) est ensuite envoyÃĐ au DS1621 qui l'attend à bras ouverts. Les autres composants sur le bus vont bien sÃŧr ignorer cette donnÃĐe. Notez que vous pouvez n'effectuer qu'une seule opÃĐration à la fois sur le bus. Quand l'opÃĐration d'ÃĐcriture sur la ligne est terminÃĐe, il faut ÂŦ couper la transmission Âŧ afin de libÃĐrer la ligne pour l'opÃĐration de lecture/ÃĐcriture suivante :
Wire.endTransmission();Pour Être plus prÃĐcis et si on veut s'assurer de la bonne transmission, la mÃĐthode Wire.endTransmission() peut aussi retourner un code qui indique le statut de la transmission (si ÃĐgal à 0, la transmission s'est correctement dÃĐroulÃĐe).
Envoyer des donnÃĐes selon le protocole I2CÂ -Â niveau physique


La transmission commence par une condition START (tandis que la ligne SCL est à l'ÃĐtat HIGH, la ligne SDA bascule à l'ÃĐtat LOW). S'ensuivent les 7 bits de l'adresse du composant (Slave Address), puis un bit R/W qui vaut ici 0 pour indiquer une opÃĐration d'ÃĐcriture sur la ligne SDA. Le composant adressÃĐ doit envoyer un bit d'acquittement (ACK pour Acknowledgement, selon les spÃĐcifications le composant esclave doit abaisser la ligne SDA pour acquitter de la bonne rÃĐception). Chaque octet de donnÃĐe ÃĐcrit sur la ligne par le maÃŪtre doit Être acquittÃĐ par l'esclave. La transmission s'arrÊte en finissant par une condition STOP (tandis que la ligne SCL est à l'ÃĐtat HIGH, la ligne SDA bascule à l'ÃĐtat HIGH).
La bibliothÃĻque Wire, comme souvent avec les bibliothÃĻques Arduino, vous offre une surcouche logicielle qui permet de vous affranchir des mÃĐandres bas niveau du protocole I2C, mais il est toujours bien d'avoir un aperçu de ce qui se dissimule sous le capot.
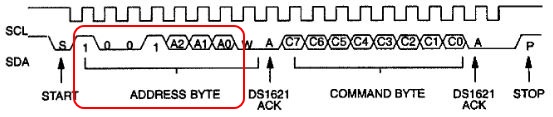
Par exemple, si on revient au lancement d'une conversion de tempÃĐrature du DS1621, il faut envoyer la commande Start Convert [0XEE], soit le chronogramme suivant d'aprÃĻs le constructeur :
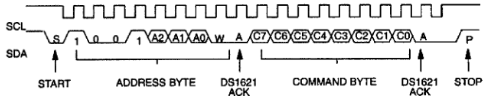
Address Byte = 0x48 (bits A0, A1 et A2 mis à zÃĐro) et Command Byte=0xEE.
En effet, la trame correspondante relevÃĐe aprÃĻs essai à l'oscilloscope (avec un module de dÃĐcodage des trames I2C) sur les lignes SDA et SCL donne :
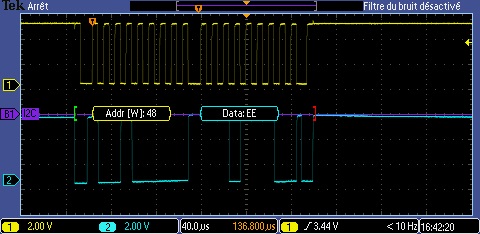
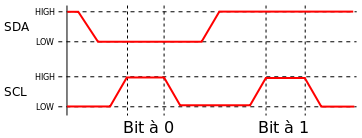
On voit que le codage des bits utilisÃĐ est de type NRZ (Non Retour à ZÃĐro), c'est-à -dire un niveau HIGH (5 V) pour coder un ÂŦ 1 Âŧ, et un niveau LOW (0 V) pour coder un ÂŦ 0 Âŧ. Pour l'ÃĐchantillonnage, le niveau HIGH ou LOW sur la ligne SDA doit Être maintenu stable pendant le niveau HIGH de l'horloge de la ligne SCL.
V-D. Comment recevoir des donnÃĐes▲
Une fois la conversion de tempÃĐrature terminÃĐe, la valeur de tempÃĐrature est stockÃĐe dans un format bien prÃĐcis dans un registre du DS1621. L'Arduino doit donc prÃĐparer le DS1621 Ã pointer vers ce registre avant de requÃĐrir les deux octets correspondants.
On commence par demander au composant I2C d'envoyer ses donnÃĐes en lui faisant pointer vers le registre souhaitÃĐ. Pour cela, on envoie la commande Read Temperature [0xAA]Â :
Wire.beginTransmission(0x48);
Wire.write(0xAA); // 0xAA = commande 'Read Temperature'
Wire.endTransmission(); // condition STOPà noter que le protocole I2C propose une condition particuliÃĻre nommÃĐe RESTART pour signifier le dÃĐbut d'une nouvelle trame dÃĻs la fin de la trame prÃĐcÃĐdente sans passer par une condition de STOP pour libÃĐrer le bus. Comme la commande Read Temperature doit Être suivie d'une opÃĐration de lecture sur le bus, on ÃĐcrira plutÃīt :
Wire.beginTransmission(0x48);
Wire.write(0xAA); // 0xAA = commande 'Read Temperature'
Wire.endTransmission(false); // condition RESTARTà partir de là , le composant I2C retournera l'ÃĐtat de son registre sous forme d'octets de donnÃĐes. L'Arduino doit alors renseigner le nombre d'octets requis.
Wire.requestFrom(0x48, 2); // Deux octets sont requisCette instruction est immÃĐdiatement suivie par la lecture consÃĐcutive des deux octets retournÃĐs par le DS1621, par exemple :
if (2 <= Wire.available()) { // si deux octets disponibles
TemperatureMSB = Wire.read(); // lire l'octet de poids fort
TemperatureLSB = Wire.read(); // lire l'octet de poids faible
}Il n'est pas nÃĐcessaire d'utiliser Wire.endTransmission() aprÃĻs la lecture sur la ligne. Une fois que les donnÃĐes demandÃĐes sont rÃĐcupÃĐrÃĐes dans leur variable respective, il ne reste plus qu'Ã les traiter.
Recevoir des donnÃĐes selon le protocole I2CÂ -Â niveau physique

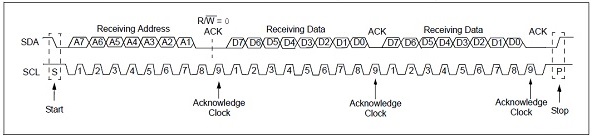
La transmission commence par une condition START (tandis que la ligne SCL est à l'ÃĐtat HIGH, la ligne SDA bascule à l'ÃĐtat LOW). S'ensuivent 7 bits de l'adresse du composant (Slave Address), puis un bit R/W qui vaut ici 1 pour indiquer une opÃĐration de lecture sur la ligne SDA. Le composant adressÃĐ doit envoyer un bit d'acquittement (ACK pour Acknowledgement, selon les spÃĐcifications le composant esclave doit abaisser la ligne SDA pour acquitter de la bonne rÃĐception). Chaque octet de donnÃĐe retournÃĐ sur la ligne par l'esclave doit Être acquittÃĐ par le maÃŪtre. La transmission s'arrÊte en finissant par une condition STOP (tandis que la ligne SCL est à l'ÃĐtat HIGH, la ligne SDA bascule à l'ÃĐtat HIGH).
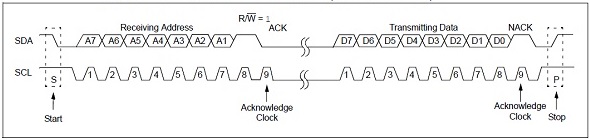
Par exemple, pour rÃĐcupÃĐrer les deux octets de poids fort et de poids faible (MSBYTE et LSBYTE) contenant la valeur de tempÃĐrature acquise par le DS1621, le chronogramme selon le constructeur est le suivant :

Address Byte = 0x48 (A0, A1 et A2 mis à zÃĐro), Command Byte = 0xAA (Read Temperature).
Un exemple de trame correspondante relevÃĐe à l'oscilloscope donne :
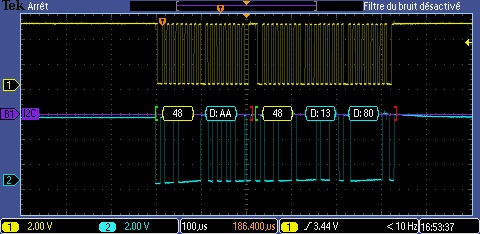
Les deux octets ÃĐcrits sur la ligne par le DS1621 et rÃĐcupÃĐrÃĐs grÃĒce à une opÃĐration de lecture par l'Arduino sont 0X13 et 0x80. Ce qui correspond à une tempÃĐrature de 19,5 °C comme nous le verrons plus tard.
V-E. Le code de dÃĐmonstration▲
Pour cette dÃĐmonstration, le programme devra faire une acquisition de tempÃĐrature, au coup par coup, disons toutes les cinq secondes. Le rÃĐsultat sera affichÃĐ dans le Terminal SÃĐrie.
La structure du croquis Arduino est la suivante :
# include <Wire.h> // La bibliothÃĻque Wire gÃĻre l'I2C
#define A0_DS1621 0
#define A1_DS1621 0
#define A2_DS1621 0
#define ADDRESS_DS1621 (0x48 | A2_DS1621<<2 | A1_DS1621<<1 | A0_DS1621)
#define ONESHOT 1 // bit 1SHOT=1 si conversion au coup par coup
#define POL 0 // bit POL, non utilisÃĐ ici
#define NVB 0 // bit NVB, non utilisÃĐ ici
#define TLF 0 // bit TLF, non utilisÃĐ ici
#define THF 0 // bit THF, non utilisÃĐ ici
/* Configuration du registre */
#define REGISTER_CONFIG (THF<<6 | TLF<<5 | NVB<<4 | POL<<1 | ONESHOT)
#define DONE_MASK 0x80 // Masque pour bit DONE
/* Commandes du DS1621 */
#define READ_TEMPERATURE 0xAA
#define ACCESS_CONFIG 0xAC
#define START_CONVERT 0xEE
#define STOP_CONVERT 0x22
byte endConversion = 0;
byte temperatureMSB = 0;
byte temperatureLSB = 0;
float temperature;
void setup(){ // Initialisation des ressources
Serial.begin(9600); // Initialisation Terminal SÃĐrie
Wire.begin(); // Initialisation I2C
/* Configuration du DS1621 */
} // fin setup
void loop(){ // boucle infinie
/* Lancement de la conversion */
/* Attendre la fin de la conversion */
/* RÃĐcupÃĐrer les deux octets de tempÃĐrature */
/* Faire les calculs et afficher la tempÃĐrature en degrÃĐs Celcius */
delay(5000); // Attendre 5 s avant de recommencer
}Si vous cÃĒblez diffÃĐremment les broches A0, A1 et A2, il vous suffit de modifier les dÃĐclarations dans le code.
Commençons par configurer le DS1621 dans le setup :
/* Configuration du DS1621 */
Wire.beginTransmission(ADDRESS_DS1621);
Wire.write(STOP_CONVERT);
Wire.endTransmission();
Wire.beginTransmission(ADDRESS_DS1621);
Wire.write(ACCESS_CONFIG); // AccÃĻs au registre de configuration
Wire.write(REGISTER_CONFIG); // ÃĐcriture dans le registre de configuration
Wire.endTransmission();On stoppe toute conversion en premier lieu. La configuration est non volatile et il se peut qu'une configuration prÃĐcÃĐdente avec des conversions de tempÃĐrature en continu soit encore mÃĐmorisÃĐe.
Pour configurer le DS1621 en mode de conversion ÂŦ au coup par coup Âŧ, il faut ÃĐcrire dans son registre de configuration au format suivant :

Le mode de conversion ÂŦ au coup par coup Âŧ est activÃĐ en mettant le bit 1SHOT à 1. Pour notre dÃĐmonstration, les autres bits peuvent Être laissÃĐs à zÃĐro.
Dans la boucle loop(), on commence par lancer une conversion de tempÃĐrature :
/* Lancement de la conversion */
Wire.beginTransmission(ADDRESS_DS1621);
Wire.write(START_CONVERT);
Wire.endTransmission();La conversion de tempÃĐrature n'est pas instantanÃĐe. Le DS1621 prÃĐvient qu'elle est terminÃĐe lorsque le bit DONE de son registre de configuration est ÃĐgal à 1 :
/* Attendre la fin de la conversion */
do {
Wire.beginTransmission(ADDRESS_DS1621);
Wire.write(ACCESS_CONFIG);
Wire.endTransmission(false); // Condition RESTART
Wire.requestFrom(ADDRESS_DS1621, 1); // Un octet est requis
if (1 <= Wire.available()) endConversion = Wire.read() & DONE_MASK;
} while (!endConversion);AprÃĻs cela, on peut rÃĐcupÃĐrer la valeur de la tempÃĐrature :
/* RÃĐcupÃĐrer les deux octets de tempÃĐrature */
Wire.beginTransmission(ADDRESS_DS1621);
Wire.write(READ_TEMPERATURE);
Wire.endTransmission(false); // Condition RESTART
Wire.requestFrom(ADDRESS_DS1621, 2); // Deux octets sont requis
if (2 <= Wire.available()) {
temperatureMSB = Wire.read(); // Octet de poids fort
temperatureLSB = Wire.read(); // Octet de poids faible
}Les deux octets de poids fort et de poids faible rÃĐcupÃĐrÃĐs reprÃĐsentent la tempÃĐrature dans un format bien documentÃĐ par le constructeur :
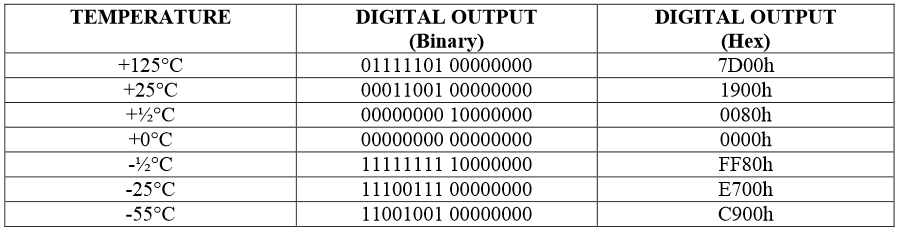
Le premier octet de poids fort est la partie entiÃĻre de la tempÃĐrature en degrÃĐs Celcius avec la mÃĐthode du complÃĐment à deux.
Dans cette reprÃĐsentation, le bit de poids fort est le bit de signe et vaut 1 pour les entiers nÃĐgatifs. Pour retrouver la valeur absolue de dÃĐpart, il faut alors faire l'opÃĐration : 256-x.
Par exemple, si l'octet de poids fort vaut 1110 0111, soit 231 en dÃĐcimal : le bit de poids fort est à 1, c'est donc une valeur nÃĐgative que l'on veut reprÃĐsenter. On rÃĐalise alors l'opÃĐration 256-231=25, et on en dÃĐduit la tempÃĐrature qui est de -25 °C.
Le deuxiÃĻme octet de poids faible vaut soit 0000Â 0000, soit 1000Â 0000. Dans ce deuxiÃĻme cas, il y a un demi-degrÃĐ Ã prendre en compte dans la partie fractionnaire de la tempÃĐrature.
On peut maintenant faire les calculs :
/* Faire les calculs et afficher la tempÃĐrature en degrÃĐs Celcius */
temperature = (float) temperatureMSB;
if (temperatureLSB & 0x80) temperature += 0.5; // 1/2 °C à prendre en compte
if (temperatureMSB & 0x80) temperature -= 256; // TempÃĐrature nÃĐgative
Serial.print("Temperature = ");
Serial.print(temperature);
Serial.println(" degres Celcius");Le code complet :
#include <Wire.h>
#define A0_DS1621 0
#define A1_DS1621 0
#define A2_DS1621 0
#define ADDRESS_DS1621 (0x48 | A2_DS1621<<2 | A1_DS1621<<1 | A0_DS1621)
#define ONESHOT 1 // bit 1SHOT=1 si conversion au coup par coup
#define POL 0 // bit POL, non utilisÃĐ ici
#define NVB 0 // bit NVB, non utilisÃĐ ici
#define TLF 0 // bit TLF, non utilisÃĐ ici
#define THF 0 // bit THF, non utilisÃĐ ici
/* Configuration du registre */
#define REGISTER_CONFIG (THF<<6 | TLF<<5 | NVB<<4 | POL<<1 | ONESHOT)
#define DONE_MASK 0x80 // Masque pour bit DONE
/* Commandes du DS1621 */
#define READ_TEMPERATURE 0xAA
#define ACCESS_CONFIG 0xAC
#define START_CONVERT 0xEE
#define STOP_CONVERT 0x22
byte endConversion = 0;
byte temperatureMSB = 0;
byte temperatureLSB = 0;
float temperature;
void setup() {
Serial.begin(9600); // Initialisation Terminal SÃĐrie
Wire.begin(); // Initialisation I2C
/* Configuration du DS1621 */
Wire.beginTransmission(ADDRESS_DS1621);
Wire.write(STOP_CONVERT);
Wire.endTransmission();
Wire.beginTransmission(ADDRESS_DS1621);
Wire.write(ACCESS_CONFIG); // AccÃĻs au registre de configuration
Wire.write(REGISTER_CONFIG); // ÃĐcriture dans le registre de configuration
Wire.endTransmission();
}
void loop() {
/* Lancement de la conversion */
Wire.beginTransmission(ADDRESS_DS1621);
Wire.write(START_CONVERT);
Wire.endTransmission();
/* Attendre la fin de la conversion */
do {
Wire.beginTransmission(ADDRESS_DS1621);
Wire.write(ACCESS_CONFIG);
Wire.endTransmission(false); // Condition RESTART
Wire.requestFrom(ADDRESS_DS1621, 1); // Un octet est requis
if (1 <= Wire.available()) endConversion = Wire.read() & DONE_MASK;
} while (!endConversion);
/* RÃĐcupÃĐrer les deux octets de tempÃĐrature */
Wire.beginTransmission(ADDRESS_DS1621);
Wire.write(READ_TEMPERATURE);
Wire.endTransmission(false); // Condition RESTART
Wire.requestFrom(ADDRESS_DS1621, 2); // Deux octets sont requis
if (2 <= Wire.available()) {
temperatureMSB = Wire.read(); // Octet de poids fort
temperatureLSB = Wire.read(); // Octet de poids faible
}
/* Faire les calculs et afficher la tempÃĐrature en degrÃĐs Celcius */
temperature = (float) temperatureMSB;
if (temperatureLSB & 0x80) temperature += 0.5; // 1/2 °C à prendre en compte
if (temperatureMSB & 0x80) temperature -= 256; // TempÃĐrature nÃĐgative
Serial.print("Temperature = ");
Serial.print(temperature);
Serial.println(" degres Celcius");
delay(5000); // Attendre 5 s avant de recommencer
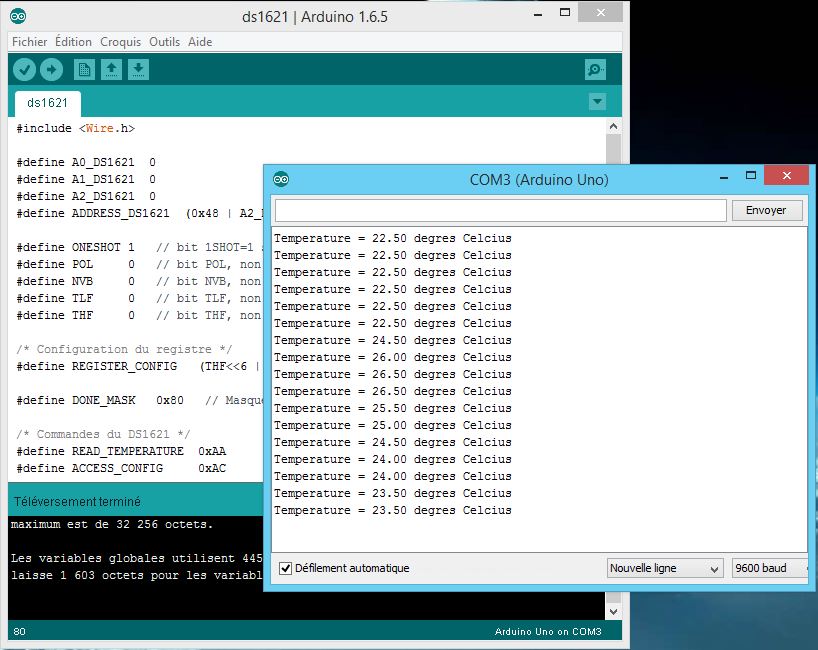
}Et le rÃĐsultat dans le Terminal SÃĐrie :
VI. Conclusion▲
La configuration d'un composant I2C et l'accÃĻs à ses diffÃĐrents registres nÃĐcessitent impÃĐrativement une lecture attentive et approfondie de la documentation fournie (la fameuse datasheet), souvent en anglais. Mais nous espÃĐrons vous avoir fait dÃĐcouvrir les principes de fonctionnement du bus I2C et que vous pourrez dÃĐsormais interfacer plus facilement les composants utilisant ce bus dans vos projets Arduino.
Do It Yourself...
VII. Sitographie▲
-
RÃĐfÃĐrences à la norme I2C sur le site de
 NXP Semiconductors :
NXP Semiconductors : - http://www.i2c-bus.org/
- BibliothÃĻque Arduino de gestion du bus I2CÂ : Wire Library
- Datasheet DS1621 chez Maxim Integrated : DS1621 Digital Thermometer and Thermostat
-
Quelques fabricants de semi-conducteurs avec un catalogue de composants I2C bien fourni :
VIII. Remerciements▲
Je remercie sevyc64, deusyss, ram-0000 et Auteur pour leur aide dans l'amÃĐlioration de cet article.
Je remercie ÃĐgalement Claude Leloup pour sa relecture orthographique.
