




I. Prûˋsentation rapide du matûˋriel et dûˋmonstration▲
Pour commencer une petite dûˋmonstration, d'un objet bien utileãÎ
Cliquez pour lire la vidûˋo
ãÎqui rappellera les aventures d'un chevalier solitaire des annûˋes 80 ![]()
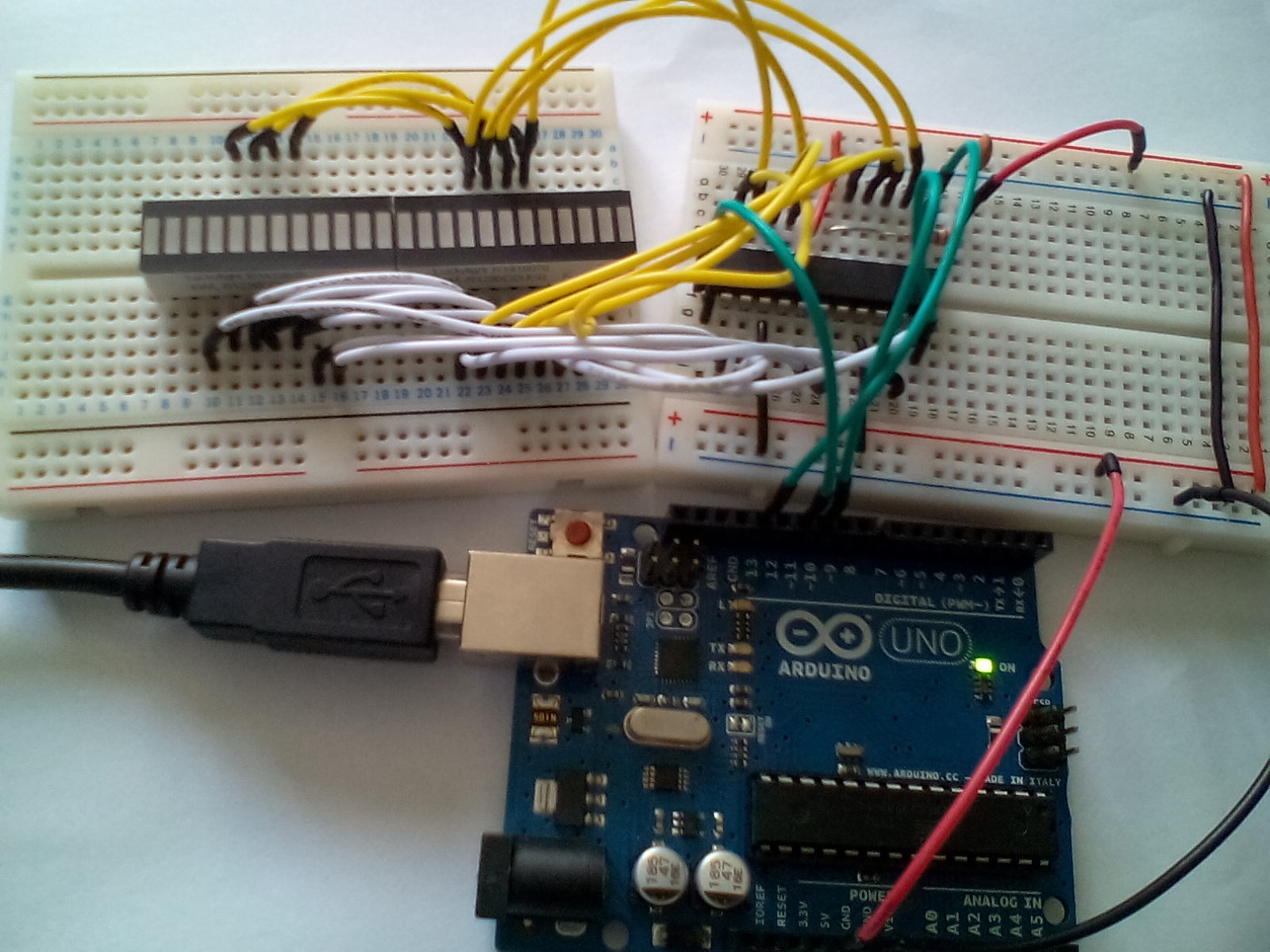
Sur la plaquette de cûÂblage rapide (breadboard), û gauche sur la photo, sont enfichûˋs et chaûÛnûˋs deux bargraphes û LED (2ô xô 12 segments bicolores) identiques, et cûÇte û cûÇte pour n'en former plus qu'un en apparence. Pourquoi deuxô ? Parce que la dûˋmonstration n'en est que plus tape-û -l'éil ainsi pour seulement quelques euros de plus, et que le contrûÇleur MAX7219, la puce enfichûˋe sur la plaquette de droite, peut les prendre en charge tous les deux.
Le MAX7219 (la version en boûÛtier DIP 28 broches) enfichûˋe sur la plaquette de droite fera donc l'interface entre l'Arduino et les bargraphes. Ce seul composant permet de piloter jusqu'û 64 LED û partir d'une liaison sûˋrie SPI utilisant seulement trois fils, les trois fils verts qui partent de la carte Arduino sur la photo.
Rûˋcapitulons le matûˋrielô :
|
Matûˋriels |
Remarques |
|---|---|
 |
Ici, j'utiliserai une carte Arduino/Genuino UNO, mais vous devriez pouvoir utiliser n'importe quelle carte Arduino/Genuino compatible. |
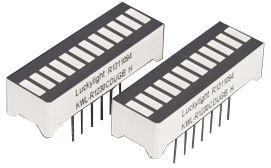 |
Voir la datasheet des composants de la sûˋrie KWL-R1230 du constructeur Luckylight. |
 |
Voir la datasheet sur le site du constructeur Maxim Integratedô : MAX7219 |
 |
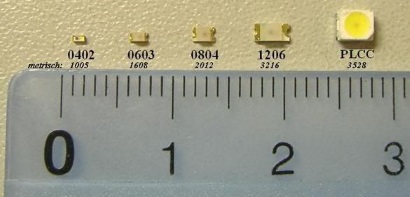
Tous ces petits matûˋriels, qui font partie de l'attirail de l'apprenti maker, peuvent ûˆtre trouvûˋs facilement chez un revendeur de matûˋriel ûˋlectronique ou dans des kits d'ûˋlectronique pour dûˋbutant. |
II. Description des composants et principe de fonctionnement▲
II-A. Le bargraphe û LED▲
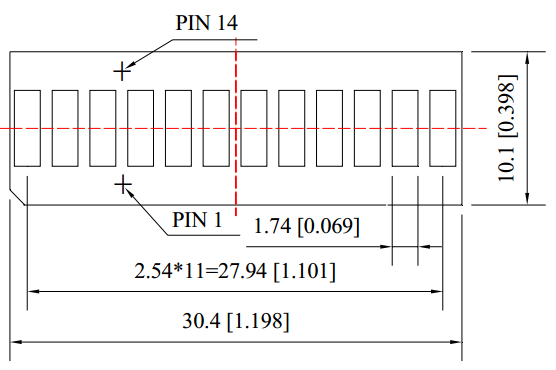
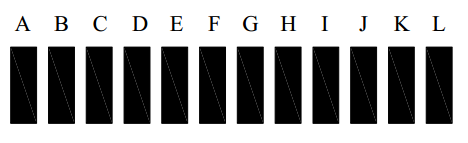
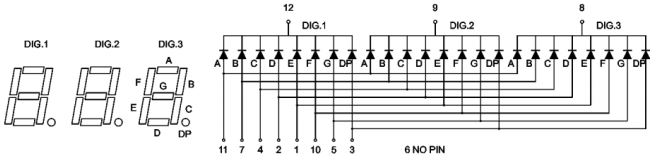
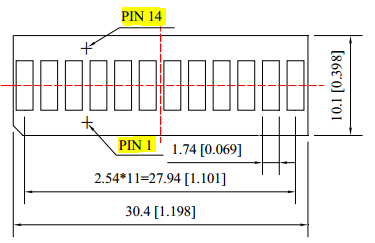
Le bargraphe comporte 12 segments repûˋrûˋs de A û L. Pour les connexions, il comprend 14 broches numûˋrotûˋes (PIN) 1 û 14 selon la disposition ci-dessous (remarquez le chanfrein en bas û gauche pour s'orienter).
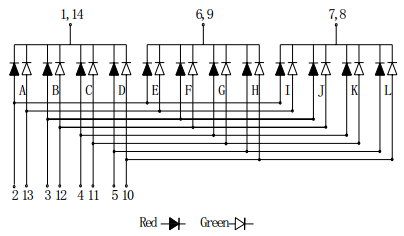
û l'intûˋrieur du bargraphe sont en fait agencûˋes 24 LED, chaque segment comportant deux LED, une rouge et une verteô :
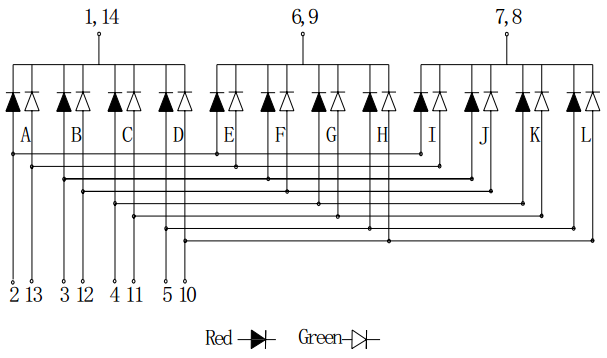
Ainsi, chaque segment peut s'illuminer en rouge, vert ou jaune par synthû´se additive du rouge et du vert.
Rappelô : la LED ( Light-Emitting Diode )
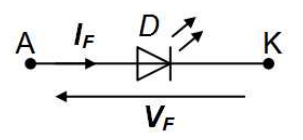
La diode est un dipûÇle û semi-conducteur (jonction PN). Les deux bornes sont repûˋrûˋes anode A et cathode K. Elle a la propriûˋtûˋ d'ûˆtre conductrice pour un certain sens du courant et non conductrice pour l'autre sens. On peut donc la faire fonctionner en commutation en la faisant passer de l'ûˋtat passant û l'ûˋtat bloquûˋ et inversement. Une LED (Light-Emitting Diode, soit diode ûˋlectroluminescente en franûÏais) a la facultûˋ d'ûˋmettre une lumiû´re lorsqu'elle est correctement polarisûˋe dans le sens direct (forward), le courant traversant la diode de l'anode vers la cathode comme sur le schûˋma ci-dessousô :
La courbe caractûˋristique IFô =ô f(VF) a l'allure suivanteô :
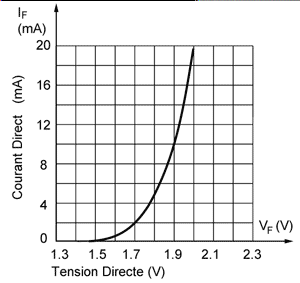
Dans le sens direct, lorsque la tension est en dessous d'une tension de seuil (Forward voltage), aucun courant ne passe. La LED est bloquûˋe et reste ûˋteinte. Lorsque la tension de seuil est atteinte, le courant passe et la LED s'allume.
Si une tension est appliquûˋe dans le sens indirect, la LED n'est plus passante, mais il ne faut pas dûˋpasser une valeur limite (reverse voltage) sous peine de destruction du composant.
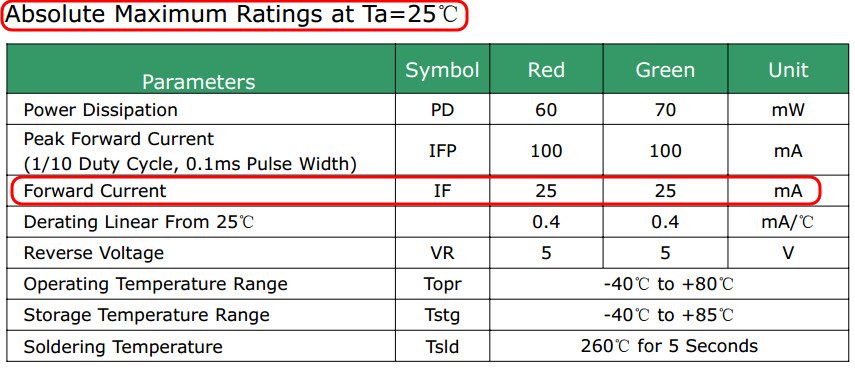
Le courant qui traverse la LED ne doit pas dûˋpasser une valeur limite donnûˋe par le constructeur. Dans le cas des LED rouge et verte de notre bargraphe, la valeur continue d'intensitûˋ supportable est de 25ô mA (100ô mA sous certaines conditions oû¿ l'alimentation est modulûˋe en largeur d'impulsion)ô :
Cet autre tableau ci-dessous donne les valeurs typiques de tension de seuil et de courantô :
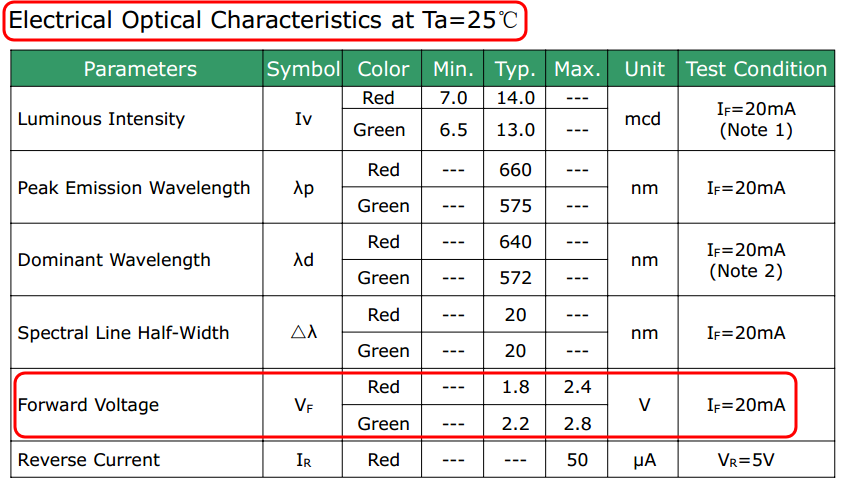
Les caractûˋristiques typiques pour une polarisation correcte des LED rouge et verte sontô :
- LED rougeô : VFô =ô 1,8ô Vô ; IFô =ô 20ô mA
- LED verteô : VFô =ô 2,2ô Vô ; IFô =ô 20ô mA
Un exercice classique (mais indispensable) pour correctement polariser une LED consiste û dûˋterminer la valeur de la rûˋsistance û mettre en sûˋrie dans le montage ci-dessousô :
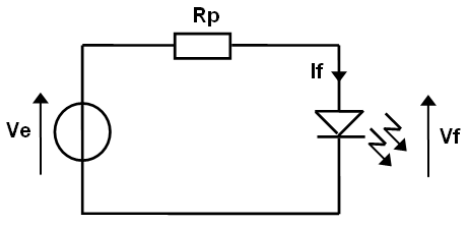
La loi des mailles donneô : Veô =ô VFô +ô Rp.IF
Si on prend les caractûˋristiques de la LED rouge du bargraphe alimentûˋe en continu sous Veô =ô 5ô V, on obtientô :
Rpô =ô (5ô -ô 1,8)ô /ô 20.10-3ô =ô 160ô öˋ
II-B. Affichage multiplexûˋ▲
La problûˋmatique est fort simple. Soit 24 LED û contrûÇler individuellementô : doit-on passer par 24 sorties de l'Arduino, avec 24 rûˋsistances ûˋlectriques et certainement de quoi amplifier le courant (24ô xô 20ô =ô 480ô mA consommûˋs lorsque toutes les LED sont allumûˋes)ô ?
Fort heureusement, non, et il existe depuis longtemps un mûˋcanisme de multiplexage(*) permettant d'ûˋconomiser û la fois l'ûˋnergie consommûˋe et le nombre de sorties nûˋcessaires au niveau de la carte Arduino. Nous allons voir ûˋgalement que la constitution de notre bargraphe est prûˋvue pour ce mode de fonctionnement.
(*) Vous trouverez une description accessible du principe de fonctionnement d'un affichage multiplexûˋ sur le site de sonelec-musique.
On remarque les trois cathodes, chacune ûˋtant commune û un paquet de huit LED. On remarque aussi que par paquets de trois LED, les anodes sont aussi communes. Par exemple, l'anode de la broche 2 est commune aux trois LED rouges des segments A, E et I, et ainsi de suite. Cet agencement particulier est propice au fonctionnement multiplexûˋ que nous allons dûˋcrire sur un exemple appliquûˋ û notre bargraphe.
Par exemple, comment allumer les segments A û J en rouge en mode multiplexûˋ, K et L restant ûˋteintsô ?
Dans les schûˋmas ci-dessous, les carrûˋs bleus reprûˋsentent les broches û l'ûˋtat bas et les carrûˋs rouges, les broches û l'ûˋtat haut.
|
ûtapeô 1ô : La broche 1 (ou 14) est û l'ûˋtat bas, les broches 2, 3, 4 et 5 û l'ûˋtat haut. 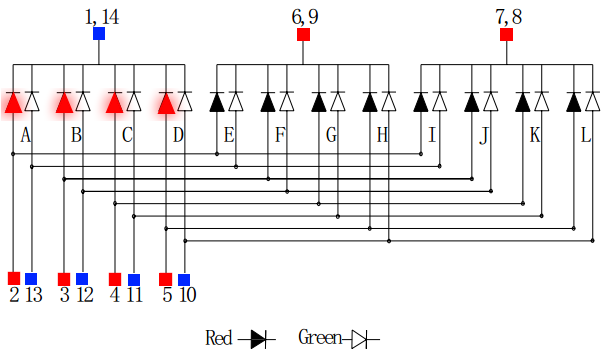 |
|
ûtape 2ô : La broche 6 (ou 9) est û l'ûˋtat bas, les broches 2, 3, 4 et 5 û l'ûˋtat haut. 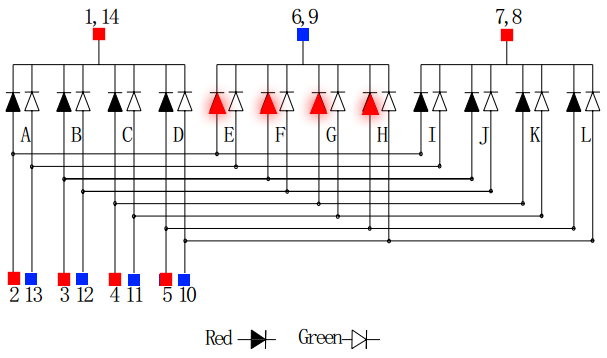 |
|
ûtape 3ô : La broche 7 (ou 8) est û l'ûˋtat bas, les broches 2 et 3 û l'ûˋtat haut. 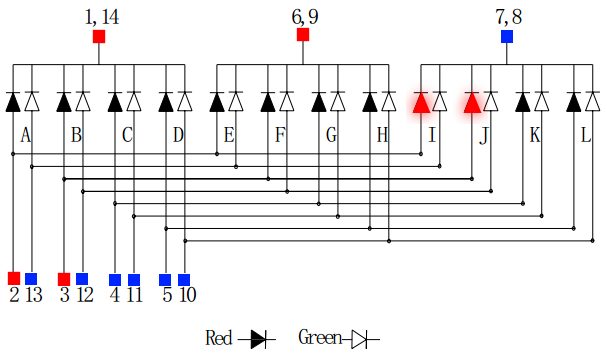 |
Pour jouer avec la persistance rûˋtinienne et crûˋer l'illusion des segments A û J allumûˋs, il suffit de rûˋpûˋter les ûˋtapes 1 û 3 en boucle û une frûˋquence suffisamment ûˋlevûˋe (25 fois par seconde au moins).
Si dans le cas d'un montage non multiplexûˋ il fallait 24 sorties de l'Arduino, dans le cas d'un montage multiplexûˋ il ne faut plus que 11 sorties pour piloter les 8 anodes et 3 cathodes. Une autre consûˋquence intûˋressante du multiplexage sur la consommation ûˋnergûˋtique est que seulement huit LED au maximum seront allumûˋes simultanûˋment.
11 sorties, cela devient jouable mûˆme pour l'Arduino UNO. Par contre, au niveau logiciel, il faut prendre en charge toute la gestion du multiplexage.
C'est jouable, mais il y a encore mieux û faire avec un composant spûˋcialisûˋ dans le pilotage de LED (un contrûÇleur ou driver d'affichage û LED). C'est lû qu'intervient le MAX7219 du fabricant de semi-conducteurs Maxim Integrated.
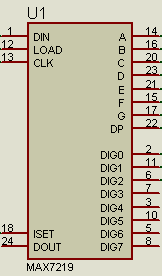
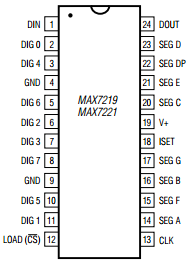
II-C. Le contrûÇleur d'affichage û LED MAX7219▲
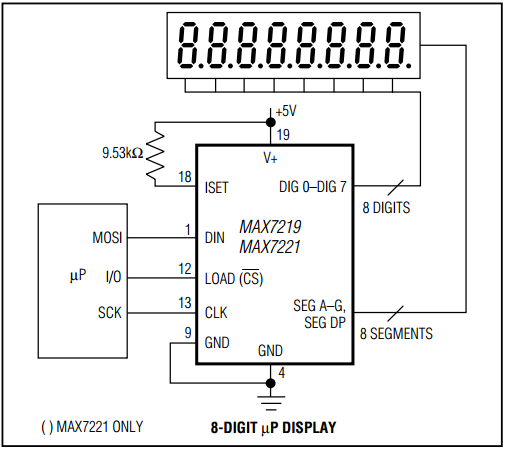
Une application typique du MAX7219 est le pilotage d'afficheur û LED, comme celui d'un radio-rûˋveil qui affiche l'heure par exemple.
L'unique rûˋsistance ûˋlectrique entre ISET et V+ permet de rûˋgler le courant qui va traverser chaque LED. Les LED rouge et verte de notre bargraphe n'ayant pas les mûˆmes caractûˋristiques, le choix doit se porter sur la valeur de la rûˋsistance qui minimise le courant, au risque d'abaisser l'intensitûˋ lumineuse pour une couleur. Ici, les caractûˋristiques sont suffisamment proches, et on ne constate aucune dûˋgradation.
Sur le montage ci-dessus, issu de la documentation de Maxim Integrated, on gû´re l'affichage de 8 chiffres (8 digits), chaque digit ûˋtant constituûˋ de 7 segments (SEGô A, SEGô B, SEGô C, ãÎ SEGô G), plus un point dûˋcimal (SEGô DP). Soit 64 LED au maximum, et notre bargraphe n'en comporte que 24.
Le MAX7219 est un composant spûˋcialisûˋ qui prend en charge le multiplexage avec une frûˋquence de 800ô Hz environ, largement suffisante pour jouer avec la persistance rûˋtinienne. Chaque sortie DIGô 0, DIGô 1ãÎ du MAX7219 doit ûˆtre reliûˋe û la cathode commune de chaque digit. Les sorties SEGô A, SEGô B, ãÎ SEGô DP sont reliûˋes aux 8 anodes des segments.
Notre bargraphe ne dispose pas de segments agencûˋs gûˋomûˋtriquement pour former des chiffres, mais son cûÂblage interne fonctionne sur le mûˆme principe qu'un afficheur 7 segments û cathode communeô :
Pour envoyer des informations au MAX7219 et le configurer, l'Arduino et celui-ci doivent s'entendre sur un protocole d'ûˋchange de donnûˋes. Le MAX7219 ne nous laisse pas le choix, c'est le protocole de communication sûˋrie SPI (Serial Protocol Interface) qui sera employûˋ ici pour ûˋcrire dans les registres du MAX7219Les registres du MAX7219. Ce protocole standardisûˋ (û peu prû´s) qui permet d'ûˋtablir une communication de type maûÛtre-esclave entre composants est simple û mettre en éuvre, et l'EDI standard Arduino offre une bibliothû´que SPI nous ûˋvitant les affres du protocole.
III. Prûˋparation du montage▲
III-A. Schûˋma de cûÂblage▲
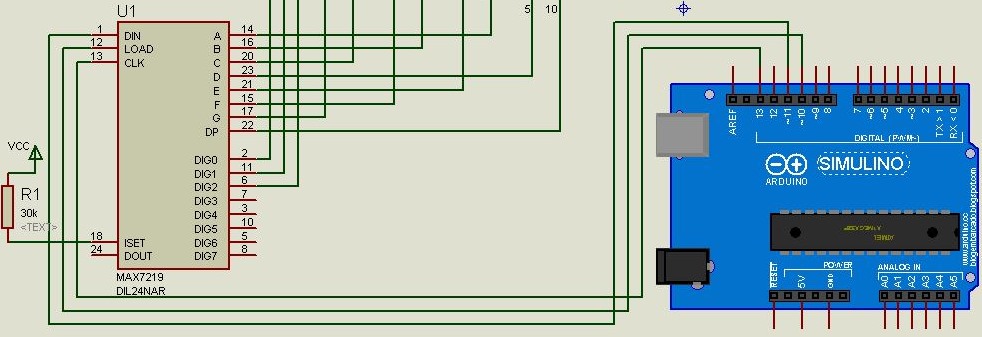
Voici une vue gûˋnûˋrale des constituants du systû´me et du cûÂblage.
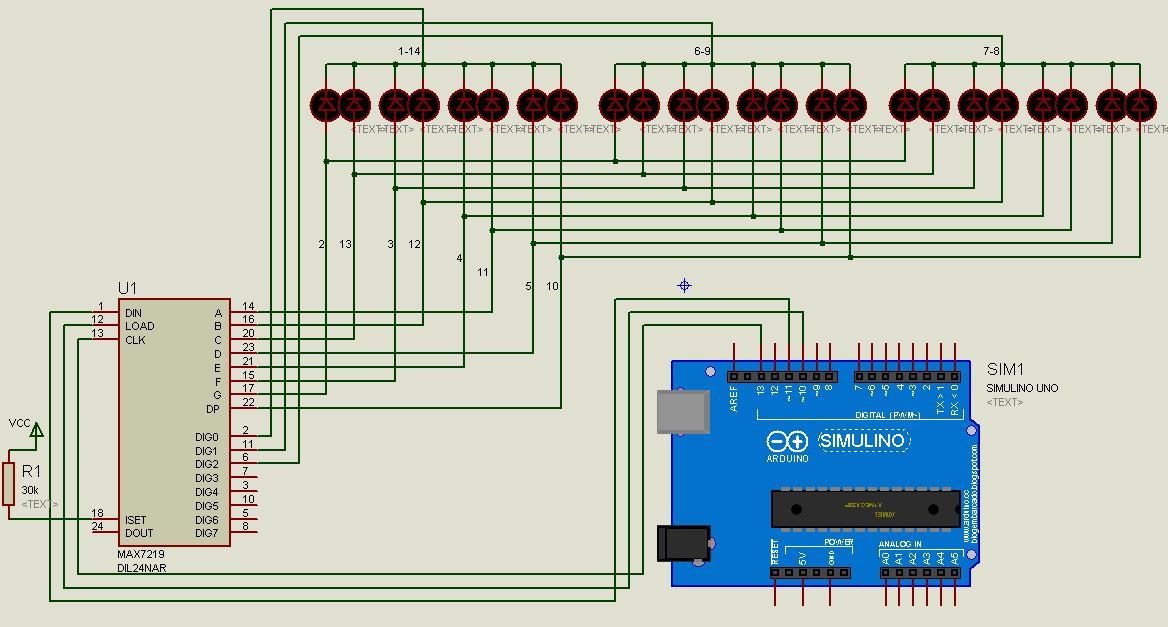
Attention de bien faire la diffûˋrence entre la disposition logique des pattes des composants, qui est lû pour faciliter la lecture du schûˋma, et la disposition physique.
|
Schûˋma logique |
Schûˋma physique |
|---|---|
 |
 |
 |
 |
III-B. Liaison MAX7219ô -ô bargraphe▲
III-B-1. CûÂblage▲
Les trois broches DIG0, DIG1 et DIG2 du MAX7219 sont reliûˋes aux trois cathodes du bargraphe. Le MAX7219 gû´re de son cûÇtûˋ l'affichage multiplexûˋ en activant û tour de rûÇle et de faûÏon cyclique chaque digit û une frûˋquence d'environ 800ô Hz.
Pour relier les broches SEGA, SEGB, ãÎ SEGDP, nous avons fait un choix.
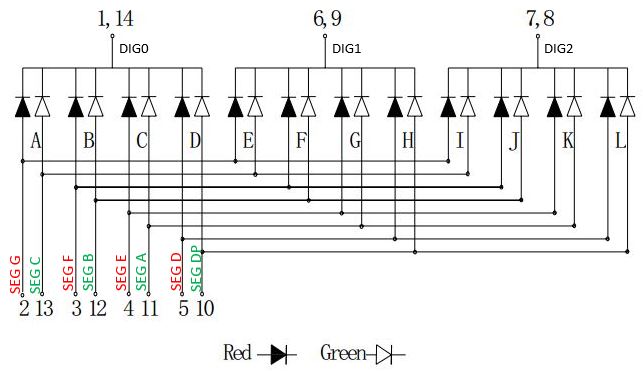
L'extrait de la documentation du MAX7219 ci-dessous montre la correspondance entre l'ûˋtat du registre de donnûˋes 8 bits et celui des LED d'un digit standard 7 segments. En mode No-Decode(1), on peut choisir de mettre un bit Dx û 1 ou û 0 pour allumer ou ûˋteindre individuellement chaque LED du segment correspondant, tout simplement.
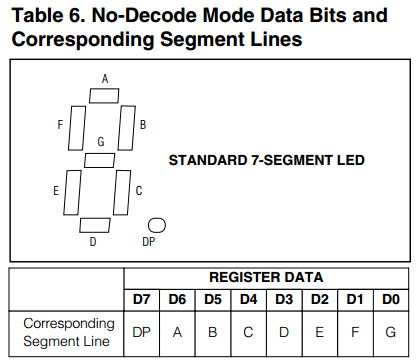
Le cûÂblage choisi devrait faciliter le codage de l'ûˋtat des LED du bargrapheô :
- les bits de poids faible D0 û D3 gûˋreront l'affichage des 4 LED rouges du digitô ;
- les bits de poids fort D4 û D7 gûˋreront l'affichage des 4 LED vertes du digit.
III-B-2. Consûˋquences sur le codage▲
Parmi les nombreux registres de configuration du MAX7219, les registres Digitô 0, Digitô 1, Digitô 2ãÎ (respectivement aux adresses 0x01, 0x02, 0x03ãÎ) contiendront chacun un octet correspondant û l'ûˋtat des segments du digit considûˋrûˋ.
On dûˋduit, du cûÂblage effectuûˋ, quelques exemples sur la faûÏon d'ûˋcrire dans les registres du MAX7219, grûÂce û une fonction writeRegister(adresse, valeur) que nous dûˋcrirons au paragraphe suivantô :
|
Premier segment en rouge 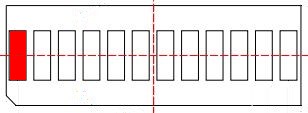 Sélectionnez |
|
Le premier segment de chaque digit en rouge 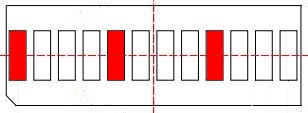 Sélectionnez |
|
Les quatre segments du premier digit en rouge  Sélectionnez |
|
Les quatre segments du premier digit en vert  Sélectionnez |
|
Les quatre segments du premier digit en jaune  Sélectionnez |
|
Comment remplir un digit, segment par segment (scan)ô ?  Sélectionnez |
Rûˋfûˋrence du langage Arduino
On pourra voir ou revoir les opûˋrateurs bit û bit, en particulier les opûˋrateurs | (OU logique) et << (dûˋcalage de bits û gauche).
III-C. Liaison SPI Arduinoô -ô MAX7219▲
SPI est un acronyme pour Serial Peripheral Interface. Il s'agit d'un bus de transmission de donnûˋes sûˋrie synchrone, oû¿ les donnûˋes peuvent circuler simultanûˋment dans les deux sens (Full-duplex), contrairement, par exemple, au bus I2C (Inter-Integrated Circuit). Pour permettre la transmission synchrone de donnûˋes, le bus SPI utilise normalement quatre fils qui sontô :
- MOSIô -ô Master out, Slave Inô : cette ligne transporte les donnûˋes de l'Arduino vers le ou les pûˋriphûˋriques SPIô ;
- MISOô -ô Master in, Slave outô : cette ligne transporte les donnûˋes du ou des pûˋriphûˋriques SPI vers l'Arduinoô ;
- SSô -ô Slave selectô : cette ligne permet de signifier au pûˋriphûˋrique connectûˋ sur le bus que nous souhaitons communiquer avec lui. Chaque pûˋriphûˋrique SPI sur le bus dispose de sa ligne SS connectûˋe û l'Arduinoô ;
- SCLKô -ô Serial clockô : l'horloge, un signal rectangulaire pûˋriodique gûˋnûˋrûˋ par le pûˋriphûˋrique maûÛtre qui, justement, cadence les ûˋchanges sur les lignes MOSI et MISO.
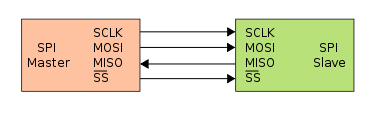
Dans ce tutoriel, on considû´re que la carte Arduino est le pûˋriphûˋrique maûÛtre (master) et le pûˋriphûˋrique SPI tel le MAX7219 est l'esclave (slave). Sur notre carte Arduino/Genuino UNO et cartes compatibles, les connecteurs utilisûˋs sontô :
- SS, connecteur D10ô : vous pouvez utiliser une autre sortie numûˋrique, mais le connecteur D10 est celui que l'on prend gûˋnûˋralement par dûˋfaut, comme il est voisin des autres connecteurs utilisûˋs pour la liaison SPIô ;
- MOSI, connecteur D11ô ;
- MISO, connecteur D12ô ;
- SCLK, connecteur D13.
Pour les utilisateurs de l'Arduino Mega, MISO est sur le connecteur D50, MOSI le D51, SCLK le D52 et SS est d'habitude le D53.
- Le connecteur MOSI de l'Arduino doit ûˆtre reliûˋ û la broche IN du MAX7219.
- Le connecteur SCLK de l'Arduino doit ûˆtre reliûˋ û la broche CLK du MAX7219.
- Le connecteur SS de l'Arduino doit ûˆtre reliûˋ û la broche LOAD du MAX7219.
Comme il n'y a pas de retour d'informations de l'esclave (le MAX7219) vers le maûÛtre (l'Arduino), le connecteur MISO de l'Arduino n'est pas utilisûˋ.
Pour plus de dûˋtails sur les connecteurs, rûˋfûˋrez-vous au document SPI library.
Ci-dessous, les dûˋclarations minimales d'usage d'un programme ûˋcrit dans l'EDI d'Arduino lorsqu'il s'agit de communiquer via la liaison SPI (voir SPI settings)ô :
#include <SPI.h>
#define LOAD 10 /* Entrûˋe LOAD du MAX72219 */
void setup() {
pinMode(LOAD, OUTPUT);
digitalWrite(LOAD, HIGH);
SPI.begin();
SPI.setBitOrder(MSBFIRST); /* bits de poids fort en premier /*
}Les commandes û envoyer au MAX7219 sont des paires d'octets (adresse de registre, valeur)ô :

Ci-dessous, la fonction writeRegister utilisûˋe pour ûˋcrire dans les registres du MAX7219ô :
void writeRegister(byte thisRegister, byte thisValue) // ûcrire dans un registre du MAX7219
{
// Mettre l'entrûˋe LOAD û l'ûˋtat bas
digitalWrite(LOAD, LOW);
SPI.transfer(thisRegister); // Adresse du registre
SPI.transfer(thisValue); // Contenu du registre
// Basculer l'entrûˋe LOAD û l'ûˋtat haut pour verrouiller et transfûˋrer les donnûˋes
digitalWrite(LOAD, HIGH);
}Pour communiquer avec un pûˋriphûˋrique SPI tel le MAX7219, on met sa broche LOAD û l'ûˋtat bas (LOW), on ûˋchange avec lui, puis on remet sa broche LOAD û l'ûˋtat haut (HIGH).
III-D. Alimentation du dispositif▲
Les alimentations sont masquûˋes dans les schûˋmas vus plus hautô :
- La broche V+ du MAX7219 doit ûˆtre reliûˋe au connecteur 5ô V de l'Arduino.
-
Les deux broches GND (4 et 9) du MAX7219 et un connecteur GND de l'Arduino doivent ûˆtre reliûˋs (masse commune).
Bien entendu, vous attendrez le dernier moment, quand tout sera prûˋparûˋ et vûˋrifiûˋ, avant d'alimenter votre dispositif.
- Pour limiter le courant qui traverse chaque LED, une rûˋsistance externe RSET doit ûˆtre cûÂblûˋe entre les broches V+ et ISET du MAX7219ô :
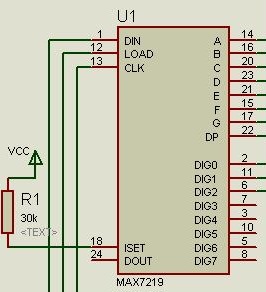
La valeur de cette rûˋsistance ne doit rien au hasard, il y va de la protection de votre MAX7219 et du bargraphe. Le constructeur fournit un tableau pour celaô :
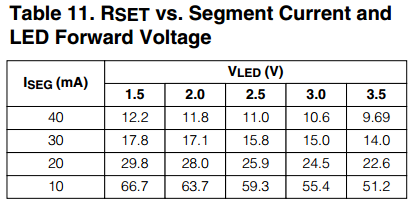
On rappelle les caractûˋristiques des LED rouge et verte du bargrapheô :
- LED rougeô : VFô =ô 1,8ô Vô ; IFô =ô 20ô mA
- LED verteô : VFô =ô 2,2ô Vô ; IFô =ô 20ô mA
Ce qui nous donne un RSET entre 27 et 29ô köˋ. Par sûˋcuritûˋ, il faut prendre la plus grande valeur et on obtient de bons rûˋsultats en termes de luminositûˋ avec RSETô =ô 29ô köˋ (la rûˋsistance normalisûˋe supûˋrieure la plus proche ûˋtant de 33ô köˋ, on associera deux rûˋsistances en sûˋrie de 27 et 2,2ô köˋ).
Faisons un bilan du courant total consommûˋ, en se plaûÏant dans le cas le plus dûˋfavorable.
Le courant maximal traversant chaque LED ûˋtant fixûˋ grûÂce û la rûˋsistance RSET, et sachant que dans le fonctionnement multiplexûˋ seules huit LED peuvent ûˆtre allumûˋes simultanûˋmentô : 8ô xô 20ô =ô 160ô mA, auxquels on rajoute environ 10ô mA consommûˋs par le MAX7219, soit environ 170ô mA. Si on prend en compte la consommation propre de la carte Arduino, environ 40ô mA, l'alimentation gûˋnûˋrale de votre dispositif doit pouvoir fournir jusqu'û 210ô mA pour fonctionner correctement.
En d'autres termes, vous ne risquez rien si vous alimentez votre dispositif avec le port USB de votre PC ou votre portable (courant maxiô =ô 500ô mA). Attention toutefois, certains notebooks ont des stratûˋgies de limitation de courant plus sûˋvû´res sur leur port USB, et il vous faudra passer par un hub USB externe ou par un autre mode d'alimentation.
IV. Les registres du MAX7219▲
Passons en revue les registres principaux du MAX7219. Pour plus de dûˋtails, rûˋfûˋrez-vous û la datasheet.
Lors de la mise en alimentation, les LED sont toutes ûˋteintes et les registres sont effacûˋs. Le MAX7219 est en mode shutdown.
|
Adresse |
Registre |
Description |
|---|---|---|
|
0x0C |
Shutdown |
0x00ô : shutdown mode |
|
0x0F |
Display-test |
Mode Test par dûˋfaut avec toutes les LED allumûˋes (0x01). Mettre û 0x00 (normal operation) pour quitter le mode Test. |
|
0x09 |
Decode-Mode |
Comme nous n'avons pas affaire û un afficheur 7 segments (pas de transcodage DCB vers 7 segments), il faut passer en mode no-decode (0x00). |
|
0x0B |
Scan limit |
Le nombre de digits û prendre en compte pour le multiplexage. Pour notre bargraphe, fixer la valeur û 0x02 (DIG0, DIG1 et DIG2). |
|
0x0A |
Intensity |
Limiter la luminositûˋ des LED par modulation en largeur d'impulsions. 0x00 û 0x0F pour la luminositûˋ maximale. |
|
0x01 |
Digitô 0 |
Valeur du premier digit. |
|
ãÎ |
ãÎ |
ô |
|
0x08 |
Digitô 7 |
Valeur du huitiû´me digit. |
V. Premiers tests▲
Un premier programme de test, sans prûˋtention, qui allume trois fois tous les segments selon la sûˋquenceô : rouge, vert et jauneô :
#include <SPI.h>
#define LOAD 10 /* Entrûˋe LOAD du MAX72219 */
#define DISPLAY_TEST 0x0F /* Registre Display-Test */
#define SHUTDOWN 0x0C /* Registre Shutdown */
#define DECODE_MODE 0x09 /* Registre Decode-mode */
#define SCAN_LIMIT 0x0B /* Registre Scan-limit */
#define INTENSITY 0x0A /* Registre Intensity */
#define DIGIT0 0x01 /* Registre Digit 0 */
#define DIGIT1 0x02 /* Registre Digit 1 */
#define DIGIT2 0x03 /* Registre Digit 2 */
void setup() {
pinMode(LOAD, OUTPUT);
digitalWrite(LOAD, HIGH);
SPI.begin();
SPI.setBitOrder(MSBFIRST); /* bits de poids fort en premier */
writeRegister(DISPLAY_TEST, 0x00); /* Normal operation */
writeRegister(DECODE_MODE, 0x00); /* No decode */
writeRegister(SCAN_LIMIT, 0x02); /* Display digits 0, 1, 2 */
writeRegister(INTENSITY, 0x08); /* LED brightness, max=0x0F */
writeRegister(SHUTDOWN, 0x01); /* Normal operation */
test(); /* Lancer le test */
writeRegister(SHUTDOWN, 0x00); /* Shutdown mode */
}
void test() {
byte allRed = 0x0F;
byte allGreen = allRed << 4;
byte allYellow = allRed | allGreen; /* synthû´se additive rouge+vert */
for (int i = 0 ; i < 3 ; i++) {
writeRegister(DIGIT0, allRed);
writeRegister(DIGIT1, allRed);
writeRegister(DIGIT2, allRed);
delay(1000);
writeRegister(DIGIT0, allGreen);
writeRegister(DIGIT1, allGreen);
writeRegister(DIGIT2, allGreen);
delay(1000);
writeRegister(DIGIT0, allYellow);
writeRegister(DIGIT1, allYellow);
writeRegister(DIGIT2, allYellow);
delay(1000);
}
}
void writeRegister(byte thisRegister, byte thisValue) // ûcrire dans un registre du MAX7219
{
// Mettre l'entrûˋe LOAD û l'ûˋtat bas
digitalWrite(LOAD, LOW);
SPI.transfer(thisRegister); // Adresse du registre
SPI.transfer(thisValue); // Contenu du registre
// Basculer l'entrûˋe LOAD û l'ûˋtat haut pour verrouiller et transfûˋrer les donnûˋes
digitalWrite(LOAD, HIGH);
}
void loop()
{
//
}VI. Codage de l'ûˋtat des segments avec un tableau▲
Le but est d'allumer le bargraphe en dûˋcrivant l'ûˋtat des segments dans un tableauô :
enum color_t {NOCOLOR, RED, GREEN, YELLOW};
const byte nb_digits = 3; /* nombre de digits du bargraph */
const byte nb_segments_digit = 4; /* nombre de segments par digit */
color_t bargraph[nb_digits * nb_segments_digit] = {
GREEN, YELLOW, RED, RED, YELLOW, GREEN,
GREEN, YELLOW, RED, RED, YELLOW, GREEN
};
bargraphDraw(bargraph);Avec ce tableau, le bargraphe sera dans l'ûˋtat suivantô :
Ci-dessous, la fonction bargraphDraw qui va calculer et transfûˋrer les valeurs aux registres en fonction du tableau passûˋ en paramû´treô :
void bargraphDraw(color_t const *mybargraph) {
byte c;
for (byte d = 0; d < nb_digits; d++) { /* pour chaque digit */
c = 0;
for (byte s = 0; s < nb_segments_digit; s++) { /* pour chaque segment du digit */
switch (mybargraph[d * nb_segments_digit + s]) {
case NOCOLOR : break;
case RED : c |= (1 << s); break;
case GREEN : c |= (1 << (s + 4)); break;
case YELLOW : c |= ((1 << s) | (1 << (s + 4))); break;
default: break;
}
}
writeRegister(d + 1, c);
}
}Enfin, û titre de dûˋmonstration, voici une sûˋquence animûˋe qui fait dûˋfiler en boucle une structure en dûˋcalant les segments vers la gaucheô :
#include <SPI.h>
#define LOAD 10 /* Entrûˋe LOAD du MAX72219 */
#define DISPLAY_TEST 0x0F /* Registre Display-Test */
#define SHUTDOWN 0x0C /* Registre Shutdown */
#define DECODE_MODE 0x09 /* Registre Decode-mode */
#define SCAN_LIMIT 0x0B /* Registre Scan-limit */
#define INTENSITY 0x0A /* Registre Intensity */
enum color_t {NOCOLOR, RED, GREEN, YELLOW};
void bargraphDraw(color_t const *mybargraph);
const byte nb_digits = 3; /* nombre de digits du bargraph */
const byte nb_segments_digit = 4; /* nombre de segments par digit */
void setup() {
pinMode(LOAD, OUTPUT);
digitalWrite(LOAD, HIGH);
SPI.begin();
SPI.setBitOrder(MSBFIRST); /* bits de poids fort en premier */
writeRegister(DISPLAY_TEST, 0x00); /* Normal operation */
writeRegister(DECODE_MODE, 0x00); /* No decode */
writeRegister(SCAN_LIMIT, nb_digits - 1); /* Display digits 0, 1, 2 */
writeRegister(INTENSITY, 0x08); /* LED brightness, max=0x0F */
writeRegister(SHUTDOWN, 0x01); /* Normal operation */
demo(); /* Lancer la dûˋmo */
writeRegister(SHUTDOWN, 0x00); /* Shutdown mode */
}
void demo() {
const byte nb_segments = nb_digits * nb_segments_digit;
color_t bargraph[nb_segments] = {
GREEN, YELLOW, RED, RED, YELLOW, GREEN,
GREEN, YELLOW, RED, RED, YELLOW, GREEN
};
bargraphDraw(bargraph);
delay(1000);
for (int i = 0; i < 10 * nb_segments; i++) {
/* dûˋcalage û gauche */
color_t c = bargraph[0];
for (int j = 0; j < nb_segments - 1; j++) {
bargraph[j] = bargraph[j + 1];
}
bargraph[nb_segments - 1] = c;
/* fin dûˋcalage û gauche */
bargraphDraw(bargraph);
delay(80);
}
delay(3000);
}
void bargraphDraw(color_t const *mybargraph) {
byte c;
for (byte d = 0; d < nb_digits; d++) { /* pour chaque digit */
c = 0;
for (byte s = 0; s < nb_segments_digit; s++) { /* pour chaque segment du digit */
switch (mybargraph[d * nb_segments_digit + s]) {
case NOCOLOR : break;
case RED : c |= (1 << s); break;
case GREEN : c |= (1 << (s + 4)); break;
case YELLOW : c |= ((1 << s) | (1 << (s + 4))); break;
default: break;
}
}
writeRegister(d + 1, c);
}
}
void writeRegister(byte thisRegister, byte thisValue) // ûcrire dans un registre du MAX7219
{
// Mettre l'entrûˋe LOAD û l'ûˋtat bas
digitalWrite(LOAD, LOW);
SPI.transfer(thisRegister); // Adresse du registre
SPI.transfer(thisValue); // Contenu du registre
// Basculer l'entrûˋe LOAD û l'ûˋtat haut pour verrouiller et transfûˋrer les donnûˋes
digitalWrite(LOAD, HIGH);
}
void loop()
{
//
}
VII. Exemple d'applicationô : un indicateur de niveau▲
Les indicateurs de niveau û LED permettent de rendre compte du niveau de charge d'une batterie, du niveau sonore d'un dispositif audio (VU-mû´tre), du niveau d'eau d'une citerne ou de carburant d'un rûˋservoir, etc.

Pour clore cet article, il ne manquait plus qu'une fonction pour rûˋaliser un indicateur personnalisûˋ. La fonction levelGauge proposûˋe prend en paramû´tre le niveau û afficher en pourcentage entre 0ô % et 100ô %. Lorsque le niveau s'approche des 100ô %, la couleur tend vers le jaune d'abord, puis le rougeô :
Syntaxe d'appelô :
levelGauge(50); /* niveau=50% */Ci-dessous un programme de dûˋmonstration avec un balayage croissant puis dûˋcroissant du niveau entre 0ô % et 100ô %ô :
#include <SPI.h>
#define LOAD 10 /* Entrûˋe LOAD du MAX72219 */
#define DISPLAY_TEST 0x0F /* Registre Display-Test */
#define SHUTDOWN 0x0C /* Registre Shutdown */
#define DECODE_MODE 0x09 /* Registre Decode-mode */
#define SCAN_LIMIT 0x0B /* Registre Scan-limit */
#define INTENSITY 0x0A /* Registre Intensity */
enum color_t {NOCOLOR, RED, GREEN, YELLOW};
void bargraphDraw(color_t const *mybargraph);
void levelGauge(unsigned int percentage);
const byte nb_digits = 3; /* nombre de digits du bargraph */
const byte nb_segments_digit = 4; /* nombre de segments par digit */
void setup() {
pinMode(LOAD, OUTPUT);
digitalWrite(LOAD, HIGH);
SPI.begin();
SPI.setBitOrder(MSBFIRST); /* bits de poids fort en premier */
writeRegister(DISPLAY_TEST, 0x00); /* Normal operation */
writeRegister(DECODE_MODE, 0x00); /* No decode */
writeRegister(SCAN_LIMIT, nb_digits - 1); /* Display digits 0, 1, 2 */
writeRegister(INTENSITY, 0x08); /* LED brightness, max=0x0F */
writeRegister(SHUTDOWN, 0x01); /* Normal operation */
demo(); /* Lancer la dûˋmo */
writeRegister(SHUTDOWN, 0x00); /* Shutdown mode */
}
void demo() {
for (int i = 0; i < 5; i++) {
for (int percent = 0; percent <= 100; percent += 5) {
levelGauge(percent);
delay(20);
}
for (int percent = 100; percent >= 0; percent -= 5) {
levelGauge(percent);
delay(20);
}
}
delay(3000);
}
void bargraphDraw(color_t const *mybargraph) {
byte c;
for (byte d = 0; d < nb_digits; d++) { /* pour chaque digit */
c = 0;
for (byte s = 0; s < nb_segments_digit; s++) { /* pour chaque segment du digit */
switch (mybargraph[d * nb_segments_digit + s]) {
case NOCOLOR : break;
case RED : c |= (1 << s); break;
case GREEN : c |= (1 << (s + 4)); break;
case YELLOW : c |= ((1 << s) | (1 << (s + 4))); break;
default: break;
}
}
writeRegister(d + 1, c);
}
}
void levelGauge(unsigned int percentage) { /* indicateur de niveau, percentage entre 0 et 100 */
unsigned int level ,
levelRed = nb_digits * nb_segments_digit - 2,
levelYellow = levelRed - 2;
color_t bargraph[nb_digits * nb_segments_digit] = {NOCOLOR}; /* parce que NOCOLOR=0, toutes les autres valeurs non indiquûˋes prendront la valeur 0 */
if (percentage > 100)
return;
if (percentage > 0) {
level = map(percentage, 0, 100, 0, nb_digits * nb_segments_digit - 1);
if (level >= levelRed) { /* niveau dans le rouge */
for (int i = levelRed; i <= level; i++) {
bargraph[i] = RED;
}
}
if (level >= levelYellow) { /* niveau dans le orange */
for (int i = levelYellow; i <= min(level, levelRed - 1); i++) {
bargraph[i] = YELLOW;
}
}
for (int i = 0; i <= min(level, levelYellow - 1); i++) {
bargraph[i] = GREEN;
}
}
bargraphDraw(bargraph);
}
void writeRegister(byte thisRegister, byte thisValue) // ûcrire dans un registre du MAX7219
{
// Mettre l'entrûˋe LOAD û l'ûˋtat bas
digitalWrite(LOAD, LOW);
SPI.transfer(thisRegister); // Adresse du registre
SPI.transfer(thisValue); // Contenu du registre
// Basculer l'entrûˋe LOAD û l'ûˋtat haut pour verrouiller et transfûˋrer les donnûˋes
digitalWrite(LOAD, HIGH);
}
void loop()
{
//
}
Il ne reste plus qu'û inclure cette fonction dans votre application et de l'adapter û votre convenance.
La fonction map intûˋgrûˋe dans le langage Arduino permet de rûˋûˋtalonner un nombre compris dans une fourchette de valeurs vers une fourchette de destination.
map(value, fromLow, fromHigh, toLow, toHigh)
Ci-dessous une dûˋmonstration avec un potentiomû´tre 10ô k sur l'entrûˋe analogique A0ô :
Cliquez pour lire la vidûˋo
Dûˋfi ![]()
Le capteur û ultrasons SRF-05 est trû´s rûˋpandu en petite robotique. Il fonctionne comme un sonar et permet de mesurer la distance d'un obstacle devant lui. En prime, il s'interface facilement avec l'Arduino.
Pour plus de dûˋtails sur le fonctionnement et la programmation de ce capteur, je vous renvoie û ce tutoriel.
Le dûˋfi consiste û reprendre le principe de l'indicateur de niveau vu prûˋcûˋdemment pour informer visuellement de la proximitûˋ d'un obstacle.
Voici une vidûˋo du rûˋsultat attenduô :
Cliquez pour lire la vidûˋo
Vous avez tous les ûˋlûˋments pour relever le dûˋfi, û vous de jouerô !
VIII. Et avec DEUX bargraphesô !▲
û dire vrai, un MAX7219 devient intûˋressant lorsque vous avez beaucoup de LED û piloter. Le MAX7219 peut gûˋrer jusqu'û 8ô digitsô xô 8ô segmentsô =ô 64ô LED. Notre bargraphe n'en comportant que 24, on peut trû´s bien accoler un deuxiû´me bargraphe et donner l'illusion d'un bargraphe unique û 2ô xô 12ô =ô 24ô segments.

L'opûˋration n'est pas bien compliquûˋe avec un peu de rigueur, car votre plaque de cûÂblage va commencer û ressembler û un plat de nouillesãÎ
Il suffit de relier les cathodes du deuxiû´me bargraphe aux broches DIG3, DIG4 et DIG5 du MAX7219, et û relier les anodes des segments SEGô A, SEGô B, ãÎ SEGô DP entre elles en suivant le schûˋma ci-dessousô :
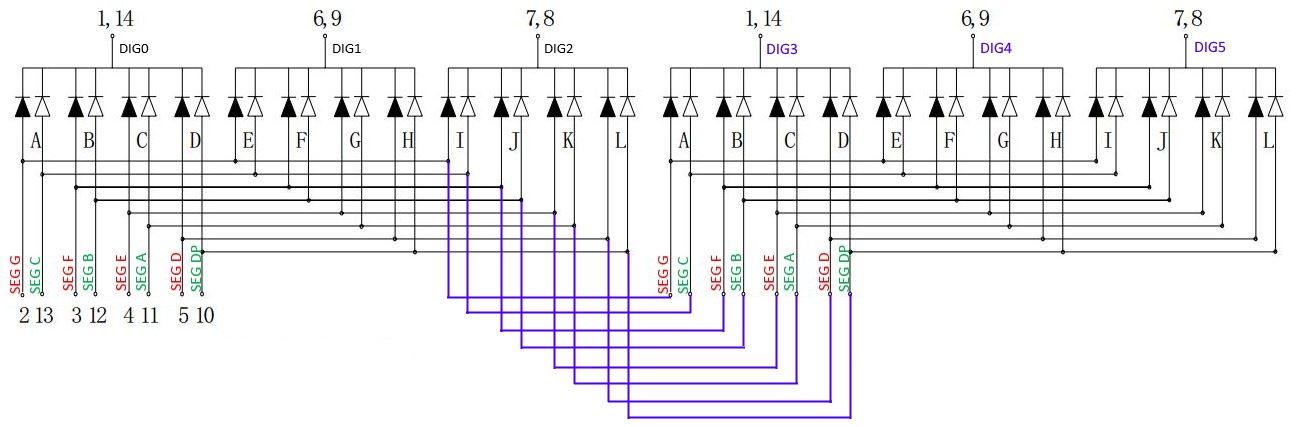
Au niveau de la programmation, il suffit d'ûˋtendre la commande aux trois digits supplûˋmentaires DIG3, DIG4 et DIG5. C'est toutãÎ
IX. Conclusion▲
Dans ce tutoriel, nous avons vu comment piloter un bargraphe û LED grûÂce au principe du multiplexage et û l'aide d'un composant spûˋcialisûˋ. Ce driver de LED communique avec l'Arduino grûÂce û une liaison SPI, un protocole de communication sûˋrie rûˋpandu û l'instar du protocole I2C, et qui ne consommera que trois connecteurs de votre carte Arduino. En suivant ces mûˆmes principes, vous ûˆtes û mûˆme de piloter d'autres dispositifs û LEDô : afficheur 7 segments, matrice ou cube de LED.

Il est û noter qu'il existe bien d'autres moyens pour piloter quantitûˋ de LEDô : d'autres drivers spûˋcialisûˋs comme le Holtek HT16K33 qui fonctionne avec une liaison I2C, ou avec des composants plus gûˋnûˋralistes comme les trû´s rûˋpandus registres û dûˋcalage. Le MAX7219 prûˋsente des avantagesô : peu de composants supplûˋmentaires (ici, une seule rûˋsistance), et pas de gestion du multiplexage û programmer, puisque le MAX7219 s'en charge tout seul.
Pour aller plus loin, vous pourriez passer û un prototype durable en soudant vos composants (le MAX7219 sera insûˋrûˋ dans un support standard 28 broches, et c'est le support qui sera soudûˋ), fils de cûÂblage, capteurs et connecteurs sur une plaque veroboard et construire un shield personnalisûˋ, que vous pourriez exploiter pour fabriquer un indicateur de niveau fonctionnel et autonome.
Mais l'essentiel reste d'avoir pu progresser dans la pratique de l'ûˋlectronique numûˋrique et des microcontrûÇleurs, le tout dans la philosophie Do It Yourself qui a motivûˋ ce tutoriel.
Je remercie Auteur et Winjerome pour leur aide prûˋcieuse dans la rûˋdaction de cet article, ainsi que Claude LELOUP pour ses corrections orthographiques.
X. Sitographie▲
-
Documentation constructeur (datasheet)
-
Le multiplexage
-
MAX7219/7221ô -ô Playground Arduino
-
La liaison SPI
