




I. û qui s'adresse ce tutorielô ?▲
Il s'adresse aux dûˋbutants en programmation des microcontrûÇleurs voulant rejoindre les adeptes du mouvement Do It Yourself dans le domaine du Physical Computing(1). ûvidemment, en grand ûˋcumeur des forums Developpez.net, la programmation en gûˋnûˋral ne vous effraie pas. Vous aimeriez juste profiter de votre mûˋtier, votre passion pour la programmation, pour interagir avec le monde physique, piloter des robots, automatiser la montûˋe/descente de vos volets dûˋroulants en fonction de l'ensoleillement, construire votre propre station mûˋtûˋo et dûˋclencher des alarmes selon des seuils de tempûˋrature, etc.
Seulement vos connaissances en physique/ûˋlectricitûˋ/ûˋlectronique remontent û vos annûˋes lycûˋe, une ûˋternitûˋãÎ Quant û souder vous-mûˆme des composants ûˋlectroniques, n'en parlons pasãÎ ûvidemment vous serez obligûˋ de vous y mettre si votre projet doit prendre de l'ampleur, mais pas tout de suite.
Vous avez dûˋjû entendu parler de la plateforme Arduino, peut-ûˆtre mûˆme achetûˋ votre Arduino Uno (une vingtaine d'euros au moment de la rûˋdaction de ces pages) avec quelques composants de base (plaque de cûÂblage rapide avec quelques fils, LED, rûˋsistancesãÎ) et programmûˋ votre premier ô¨ô Hello Worldô ô£ (programme qui consiste û faire clignoter la LED intûˋgrûˋe û la carte via la broche nô¯ô 13). Vous avez peut-ûˆtre mûˆme dûˋjû commencûˋ û combler vos lacunes en ûˋlectronique de base, suivi quelques tutoriels pour allumer une, deux puis trois LED voire plus. Classique et indispensable pour dûˋbuterãÎ
Ce tutoriel va reprendre un peu tout cela notamment dans cette premiû´re partie, mais il propose ûˋgalement d'aller un peu plus loin avec l'utilisation de capteurs ûˋvoluûˋs, la dûˋcouverte des cartes d'interface (ou shields) et de bibliothû´ques tierces. Le programme est vaste, mais les ressources proposûˋes vous permettront de vous lancer dans des projets plus ambitieux en vous tenant le plus possible û l'ûˋcart du fer û souder.
L'objectif reste le mûˆme que celui de la communautûˋ Arduino, dûˋcouvrir et s'amuserãÎ
II. RûÇle de la carte Arduino dans l'objet pluritechnique▲
Vous souhaitez crûˋer votre premier robot û moindre coû£tô ? De nombreux kits û base d'une carte Arduino sont disponibles sur le Netô :
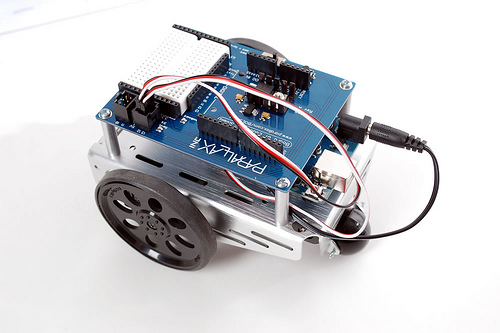
Ce petit robot roulant û vocation pûˋdagogique possû´de deux roues indûˋpendantes motorisûˋes et peut ûˆtre ûˋquipûˋ de multiples capteurs pour dûˋtecter des obstacles, suivre une ligne au sol, etc.
La structure de cet objet ludique et pluritechnique est rûˋsumûˋe dans le diagramme fonctionnel ci-dessous (merci û l'ûducation nationale û qui j'ai empruntûˋ ces magnifiques diagrammes![]() )ô :
)ô :

La partie infûˋrieure comporte la ô¨ô chaûÛne d'ûˋnergieô ô£ dont le rûÇle est d'adapter/convertir le flux d'ûˋnergie rentrant (de nature ûˋlectrique) en ûˋnergie mûˋcanique utilisable au niveau des deux roues motrices.
La partie supûˋrieure comporte la ô¨ô chaûÛne d'informationô ô£. Les flû´ches en bleu constituent donc des flux d'information. Cette partie doit acquûˋrir les informations renvoyûˋes par les capteurs (luminositûˋ pour suivre une ligne noire au sol, ultrason pour dûˋtecter les obstaclesãÎ), les traiter et communiquer les ô¨ô ordres de commandeô ô£ û la chaûÛne d'ûˋnergie, ûˋventuellement informer l'utilisateur (signal sonore ou lumineux par exemple).
Il apparaûÛt clairement que c'est dans la chaûÛne d'information dûˋvolue principalement au traitement de l'information que notre carte Arduino joue son rûÇle.
Il apparaûÛt ûˋgalement que la carte Arduino est incapable de transmettre directement ô¨ô la puissanceô ô£ aux moteurs ûˋlectriques. Effectivement chacune de ses entrûˋes/sorties numûˋriques peut absorber ou dûˋlivrer un courant ûˋlectrique maximum de 40ô mA sous 5ô Volts (sans dûˋpasser les 200ô mA pour l'ensemble des entrûˋes/sorties) ce qui est insuffisant ûˋtant donnûˋ le courant typiquement absorbûˋ par ce genre de moteur ûˋlectrique.
C'est pour cela que vous devez passer par une ô¨ô carte d'interfaceô ô£ (ici û base de relais) qui û partir des ô¨ô ordres de commandeô ô£ communiquûˋe par l'Arduino (signaux vûˋhiculant de l'information de faible puissance ûˋlectrique) permet de ô¨ô distribuerô ô£ une puissance adaptûˋe û chaque moteur.
Si vous n'avez pas tout assimilûˋ û cette description, retenez au moins ceciô :
Le rûÇle de la carte Arduino est de vûˋhiculer de l'ô ô¨ô informationô ô£ (signaux ûˋlectriques de faible puissance), et non de transmettre directement de la puissance û un actionneur tel un moteur ûˋlectrique.
Ceux qui ont essayûˋ de transmettre de la puissance sans passer par ces composants d'interface ont seulement rûˋussi û transmettre des signauxãÎô de fumûˋe![]()
III. Description de la carte Arduino Uno▲
Il existe de nombreux modû´les de cartes Arduino, la plus populaire ûˋtant probablement la Uno.
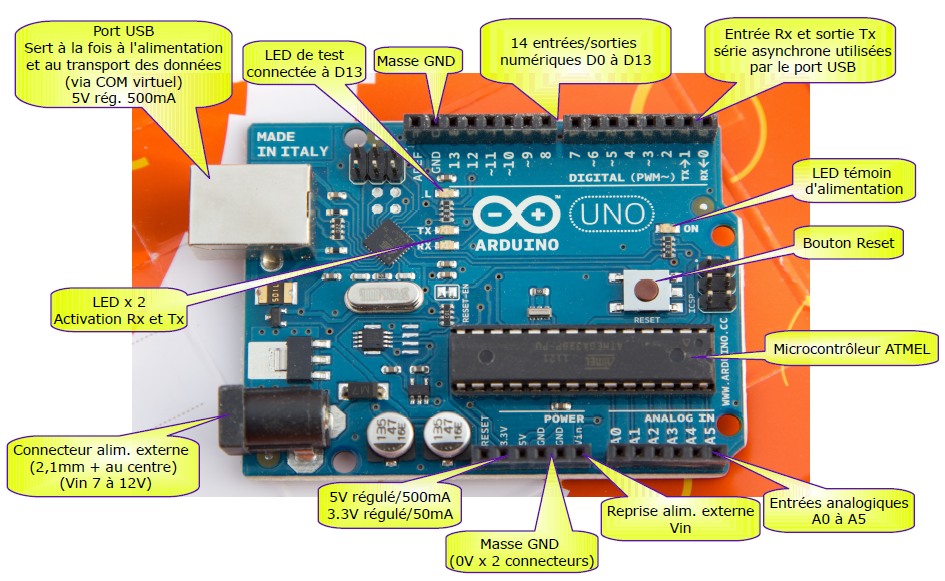
Le document ci-dessous vous donne un aperûÏu de l'organisation de la carte (dimensionsô : 65ô xô 52ô mm) dans sa version Uno.
III-A. Le microcontrûÇleur▲
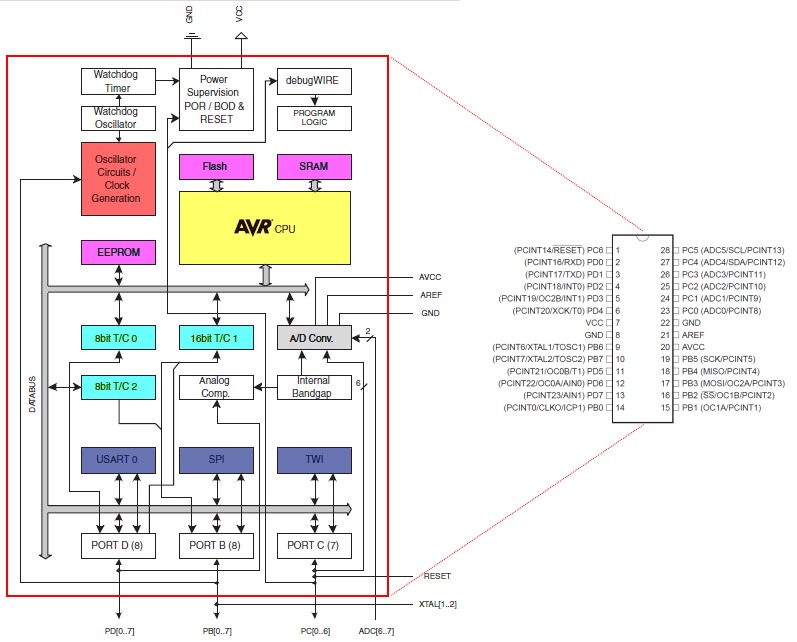
Au moment de la rûˋdaction de ces lignes, le céur de la carte Arduino Uno est un microcontrûÇleur de la famille AVR, un Atmel Atmega 328P.
Ce microcontrûÇleur renferme dans un seul composantô :
- un processeur 8 bits û architecture RISCô ;
- de la mûˋmoire avec des espaces physiques sûˋparûˋsô :
- mûˋmoire Flash (32ô Ko) pour les programmes,
- mûˋmoire vive SRAM (2ô Ko) pour les donnûˋes,
- mûˋmoire EEPROM (2ô Ko) pour les donnûˋes de sauvegardeô ;
- toute la logique d'horloge (16ô MHz)ô ;
- des circuits d'interface et des pûˋriphûˋriques d'entrûˋe-sortie permettant au processeur d'accûˋder au monde extûˋrieurô :
- des Timers/Counters (T/C) 8 et 16 bits,
- gûˋnûˋration des signaux PWM,
- des interfaces de communication sûˋrie (UART, SPI, TWI compatible I2CãÎ),
- un convertisseur Analogique-Numûˋrique (A/D Conv.),
- etc.
Un processeur û 16ô MHz et 32ô Ko de mûˋmoire Flash pour stocker vos programmes, ces chiffres peuvent prûˆter û sourire en comparaison des GHz et des Go de votre ordinateur personnel. Mais avec son format carte de crûˋdit et une consommation infûˋrieure au Watt, la carte Arduino satisfera pourtant vos premiû´res exigences en termes d'embarquûˋ.
III-B. L'alimentation▲
Elle a lieu sous une tension de 5 Volts. Elle peut provenir soit de la prise USB lorsque la carte est reliûˋe û l'ordinateur, soit d'un bloc secteur externe (tension entre 7 et 12 Volts, 1 Ampû´re) via la prise jack standard.
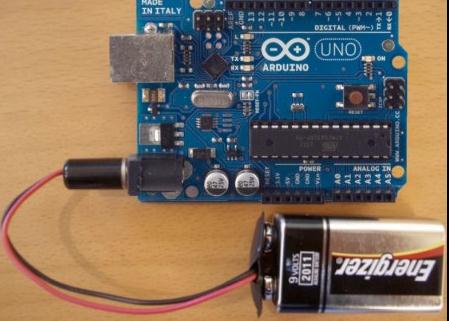
Comme la carte consomme trû´s peu (0,5ô W), elle peut ûˋgalement ûˆtre alimentûˋe par une simple pile 9ô V.
Les rûˋgulateurs montûˋs sur la carte permettent de fournir des tensions stabilisûˋes û 3,3 ou 5 Volts pour alimenter des pûˋriphûˋriques (capteurs, shieldsãÎ).
Les tensions appliquûˋes aux entrûˋes ne doivent pas dûˋpasser la tension d'alimentation sous peine de dûˋtruire le circuit.
III-C. Les entrûˋes/sorties▲
Ce sont les deux rangûˋes de connecteurs de part et d'autre de la carte qui permettent sa connexion au monde extûˋrieur.
III-C-1. Les entrûˋes/sorties numûˋriques D0 û D13▲

Chacun des connecteurs D0 û D13 peut ûˆtre configurûˋ dynamiquement par programmation en entrûˋe ou en sortie.
Les signaux vûˋhiculûˋs par ces connecteurs sont des signaux logiques compatibles TTL, c'est-û -dire qu'ils ne peuvent prendre que deux ûˋtats HAUT (5ô Volts) ou BAS (0ô Volt).
En pratique, les connecteurs D0 et D1 rûˋservûˋs pour la liaison sûˋrie asynchrone (port COM virtuel via le cûÂble USB) ne sont pas exploitûˋs pour d'autres utilisations.
û noter que chacun des connecteurs ne peut fournir ou absorber un courant supûˋrieur û 40ô mA environ (200ô mA pour l'ensemble des connecteurs).
Certains connecteurs peuvent ûˆtre spûˋcialisûˋs comme sorties PWM (repûˋrûˋes par un ~) mais nous sortons ici du cadre de ce tutoriel.
III-C-2. Les entrûˋes analogiques A0 û A5▲

Par dûˋfaut et contrairement aux entrûˋes/sorties numûˋriques qui ne peuvent prendre que deux ûˋtats HAUT et BAS, ces six entrûˋes peuvent admettre toute tension analogique comprise entre 0 et 5ô Volts.
Pour pouvoir ûˆtre traitûˋes par le microcontrûÇleur, ces entrûˋes analogiques sont prises en charge par un CAN (Convertisseur Analogique Numûˋrique ou ADC pour Analog Digital Converter) dont le rûÇle est de convertir l'ûˋchantillon de tension VE en une grandeur numûˋrique binaire sur n bits.

Le principe de la conversion Analogique-Numûˋrique est reprûˋsentûˋ ci-dessous (avec n=3 bits et la tension de rûˋfûˋrence Vref=5ô Volts)ô :

Le convertisseur de la carte Arduino Uno possû´de une rûˋsolution de 10 bits, soit 210ô =ô 1024 possibilitûˋs de 0 û 1023.
Ainsi, pour n=10 bits et la tension de rûˋfûˋrence par dûˋfaut Vref=5ô Volts, si la tension analogique d'entrûˋe ûˋchantillonnûˋe est VE=3,8ô Voltsô , la grandeur numûˋrique N (ici en entier dûˋcimal) en sortie du convertisseur peut ûˆtre calculûˋe grûÂce aux relationsô :
quantum qô =ô Vref/2nô =ô 5ô /ô 210ô =ô 5ô /ô 1024
Nô =ô VEô /ô qô =ô 3,8ô xô 1024ô /ô 5 soit Nô =ô 778
Il y aurait encore bien des choses û dire pour avoir une description plus complû´te de la carte et nous sommes restûˋ sur l'essentiel.
La plateforme Arduino ûˋtant open source, une description plus complû´te et les schûˋmas de la carte sont donc librement disponibles sur le site officiel.
IV. L'environnement de dûˋveloppement▲
IV-A. Installation▲
Pour l'installation (Windows, Mac OS X et Linux), rûˋfûˋrez-vous aux indications pas û pas du site officielô : Getting Started with Arduino.
IV-B. Premier pas dans l'IDE▲
Voici û quoi ressemble l'IDE (Windows), ici avec le programme de dûˋmonstration Blinkô :
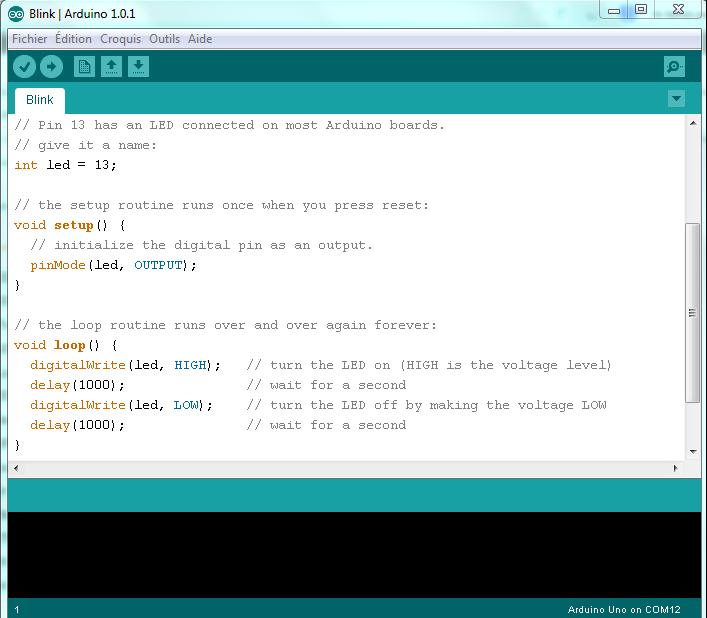
Ce premier programme se contentera de faire clignoter la LED jaune tûˋmoin qui se trouve prû´s du connecteur D13 de la carte Arduino Uno.
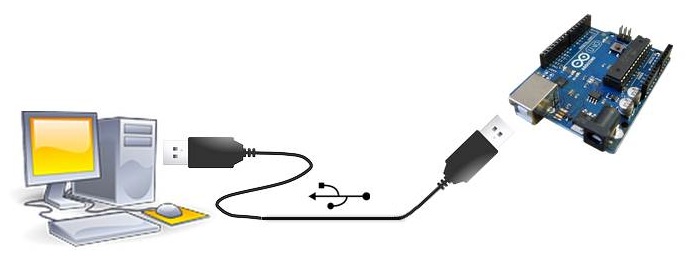
Avant de tûˋlûˋcharger le programme dans la carte, il faut relier l'ordinateur et la carte via le cûÂble USBô :
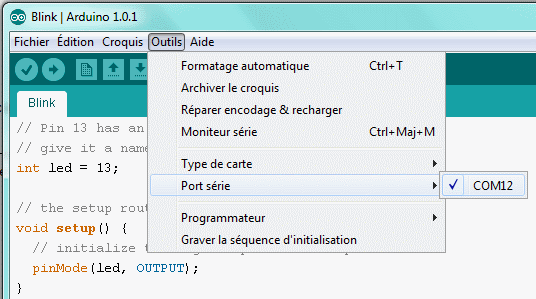
Une fois le port activûˋ et reconnu sur l'ordinateur, il faut ûˋventuellement dûˋsigner le bon dans l'interfaceô :
Finalement, le processus de rûˋdaction du programme jusqu'û son tûˋlûˋchargement dans la carte peut ûˆtre rûˋsumûˋ grûÂce au schûˋma suivantô :

IV-C. Le langage de programmation ▲
Sous Windows par exemple, lorsque vous lancez la compilation dans l'IDE, ce sont les outils de la suite WinAVR avec son compilateur GCC qui prennent le relais.
En fait, vous programmez dans un langage propre û Arduino dont la structure s'apparente aux langages C/C++. Mais lorsque vous ûˋvoquez une fonction Arduino, non standard C/C++, et pourtant reconnue et coloriûˋe comme un mot-clûˋ dans l'ûˋditeur, vous faites appel en toute transparence û une ou plusieurs bibliothû´ques rûˋdigûˋes en C ou C++ qui seront incluses û la compilation.
En enveloppant le langage C/C++ de cette maniû´re, les concepteurs de l'IDE ont pu simplifier sa syntaxe et l'adapter aux possibilitûˋs de la carte. De nombreuses fonctionnalitûˋs de haut niveau sont ainsi proposûˋes û l'utilisateur novice qui n'a plus û se soucier de la logique interne du microcontrûÇleur.
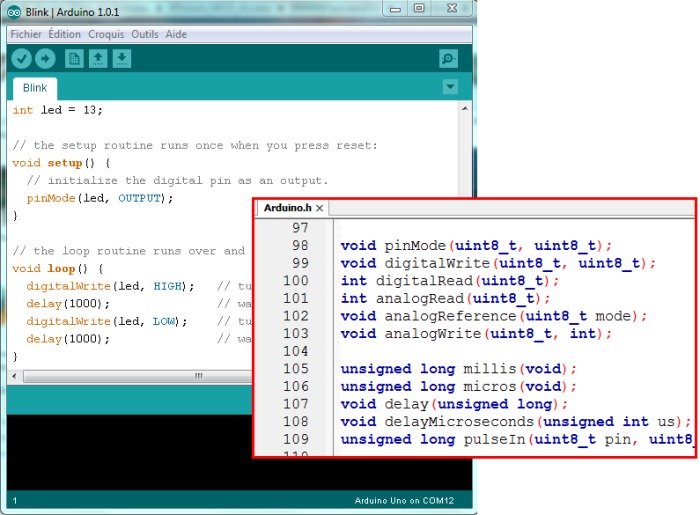
Revenons au programme de dûˋmonstration Blinkô :
/*
Blink
Turns on an LED on for one second, then off for one second, repeatedly.
This example code is in the public domain.
*/
// Pin 13 has an LED connected on most Arduino boards.
// give it a name:
int led = 13;
// the setup routine runs once when you press reset:
void setup() {
// initialize the digital pin as an output.
pinMode(led, OUTPUT);
}
// the loop routine runs over and over again forever:
void loop() {
digitalWrite(led, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(led, LOW); // turn the LED off by making the voltage LOW
delay(1000); // wait for a second
}La structure d'un programme Arduino, rûˋdigûˋ dans l'ûˋditeur, ressemble û ceci et doit toujours comporter les fonctions setup() et loop()ô :
// Dûˋfinition des constantes, variables globales
// directives de compilation define, include, etc.
void setup() {
// initialisation des ressources de la carte,
// configuration des entrûˋes/sorties,
// dûˋfinition de la vitesse de fonctionnement du port sûˋrie, etc.
// setup() n'est exûˋcutûˋ qu'une seule fois.
}
void loop() {
// les instructions contenues ici sont exûˋcutûˋes indûˋfiniment en boucle
// Seule une coupure de l'alimentation de la carte ou un appui sur le bouton Reset
// permet de quitter le programme.
}Nous n'allons pas ici dûˋcrire toutes les instructions du langage Arduino, vous trouverez les rûˋfûˋrences et la syntaxe sur le site officielô :
Nous insistons tout de mûˆme sur les fonctions implantûˋes pour la gestion des entrûˋes/sorties de la carteô :
| Fonction | Description (partielle) |
| pinMode() | Configuration des broches numûˋriques en entrûˋe ou en sortie. |
| digitalWrite() | Pour une broche numûˋrique configurûˋe en sortie, cette instruction permet de mettre son niveau logique û HAUT ou BAS. |
| digitalRead() | Lecture du niveau logique (HAUT ou BAS) d'une broche numûˋrique configurûˋe en entrûˋe. |
| analogWrite() | La carte ne possû´de pas de Convertisseur Numûˋrique Analogique. Il n'est donc thûˋoriquement pas possible d'obtenir une tension continue qui soit l'image d'une valeur numûˋrique (pas de sortie analogique). Il est par contre possible d'en reproduire le comportement en gûˋnûˋrant un signal rectangulaire (PWM ou MLI) de rapport cyclique rûˋglable. Beaucoup de composants (LED, moteur ûˋlectrique û courant continu) agissent comme des filtres passe-bas et fonctionnent comme s'ils ûˋtaient alimentûˋs sous une tension continue ûˋgale û la valeur moyenne du signal. |
| analogRead() | Lecture de la valeur de la tension prûˋsente sur une entrûˋe analogique (A0 û A5 sur la Uno). La fonction retourne la valeur issue de la Conversion Analogique Numûˋrique, soit une valeur comprise entre 0 et 1023 (convertisseur 10 bits). |
Ainsi, dans la boucle infinie loop()ô :
void loop() {
digitalWrite(led, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(led, LOW); // turn the LED off by making the voltage LOW
delay(1000); // wait for a second
}La broche nô¯ô 13, reliûˋe û la LED intûˋgrûˋe û la carte, passe alternativement du niveau logique HAUT (HIGH) au niveau logique BAS (LOW) aprû´s un dûˋlai d'une seconde, ce qui la fait clignoter.
Comme vous le voyez û travers cet exemple, les concepteurs du langage ont prûˋvu d'interfacer facilement vos programmes avec le monde extûˋrieur.
V. Les cartes d'interface ou Shield▲
Une carte Arduino seule, mûˆme si vous disposez de quelques LED, rûˋsistances, boutons poussoir, etc. n'est pas d'une grande utilitûˋ et reste dans ce cas limitûˋe û des fins d'apprentissage. Si vous voulez aller plus loin et piloter les moteurs de votre robot, vous devrez passer par une interface dûˋdiûˋe (des composants sur une carte ûˋlectronique).
Une fois de plus, sous la poussûˋe de la communautûˋ Arduino, de nombreux fabricants proposent une plûˋthore de cartes d'interface capables de couvrir la majoritûˋ des besoins (capteurs, relais de puissance, commande de moteurs, Internet, affichage sur matrice LED ou ûˋcran LCD, communication WifiãÎ).
V-A. Qu'est-ce qu'un shieldô ?▲
Un shield est une carte d'interface spûˋcialement dûˋdiûˋe û l'Arduino. Ces cartes ont des dimensions sensiblement voisines de la carte Arduino et peuvent s'enficher directement sur les connecteurs de celle-ci.
Il est bien sû£r impossible de recenser entiû´rement ici les centaines de shields existant sur le marchûˋ (dont quelques-uns rûˋfûˋrencûˋs sur le site officiel). Vous trouverez une liste de fabricants et/ou distributeurs de shields pour Arduino dans la sitographie en fin de tutoriel.
On peut tout de mûˆme en signaler quelques-uns bien pratiques et donner une idûˋe(2).
V-A-1. Pour le prototypage▲

Une fois enfichûˋe sur la carte Arduino, ce shield reprend tels quels les connecteurs de part et d'autre de la carte. On peut alors coller une plaque de cûÂblage rapide (breadboard en anglais) dans la partie centrale (en plastique vert moulûˋ sur la photo).
Cette plaque permet de cûÂbler de nombreux composants sans faire de soudure et garder le montage entiû´rement dûˋmontable.
Le montage sur plaque d'essai ci-dessous, dessinûˋ avec le logiciel gratuit Fritzing, montre une LED branchûˋe sur la broche D10 de l'Arduino avec sa rûˋsistance en sûˋrie.
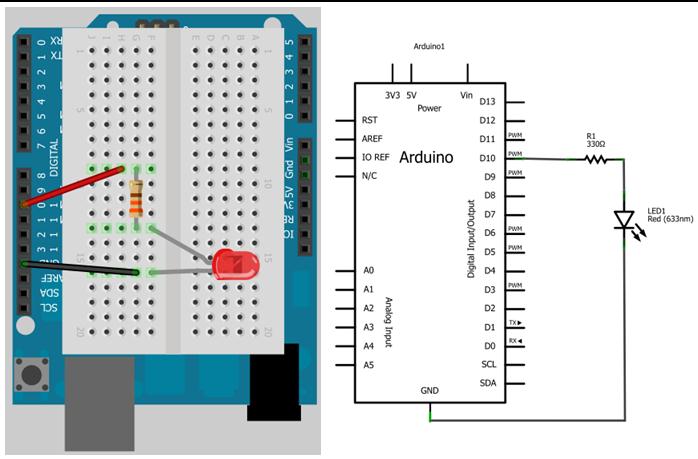
Il ne reste plus qu'û reprendre le programme de dûˋmonstration Blink au niveau de la ligneô :
int led=10;et le tour est jouûˋ pour faire clignoter la LED rouge.
V-A-2. Pour l'affichage▲
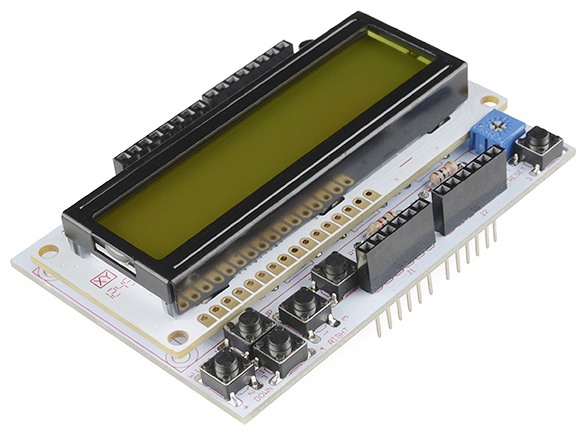
Ce shield, en plus de son ûˋcran LCD (deux lignes de 16 caractû´res), comporte cinq boutons-poussoirs programmables.
La bibliothû´que LiquidCrystal qui permet de piloter l'affichage est disponible par dûˋfaut dans l'IDE Arduino.
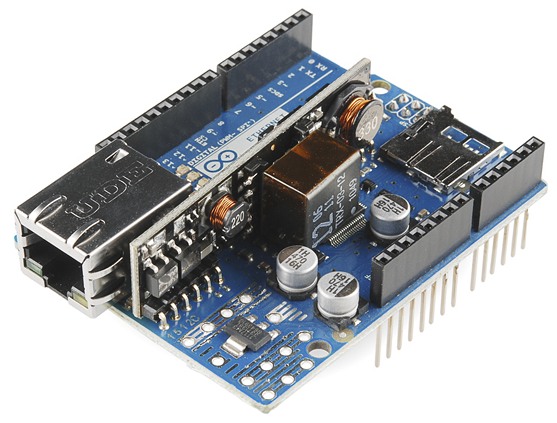
V-A-3. Pour la commande des moteurs▲
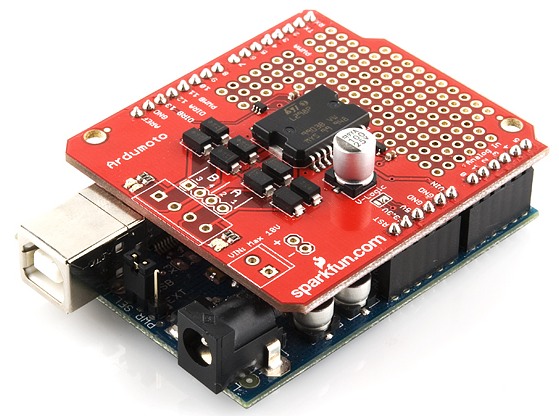
Ce shield permet de piloter jusqu'û deux moteurs ûˋlectriques simultanûˋment (idûˋal pour un petit robot roulant û deux roues motorisûˋes indûˋpendantes). Avec deux connecteurs numûˋriques utilisûˋs par moteur seulement, vous contrûÇlez le sens et la vitesse de rotation du moteur.
V-A-4. Pour communiquer▲
Si vous souhaitez rendre disponible l'ûˋtat d'un capteur de tempûˋrature sur un rûˋseau local Ethernet ou sur Internet, ce shield ûˋvoluûˋ avec une bibliothû´que trû´s complû´te et de nombreux exemples de programmes saura transformer votre Arduino en vûˋritable serveur web connectûˋ sur l'extûˋrieur.
V-B. Comment bien choisir son shield▲
Certains shields sont mieux pensûˋs que d'autres et tout peut se compliquer si vous devez empiler les shields les uns sur les autres, car un seul ne suffit pas.
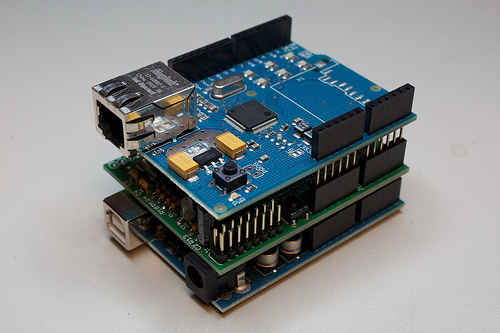
En voulant combiner les caractûˋristiques de plusieurs shields, vous risquez de faire rentrer certaines de leurs fonctionnalitûˋs en conflit matûˋriel et/ou logiciel. Telle carte ne pourra pas s'empiler sur telle autre, car les broches de la carte du dessus sont trop courtes pour s'enficher correctement sur la carte du dessous û cause d'un composant trop ûˋpais. Telle bibliothû´que logicielle dûˋdiûˋe û un shield rentre en conflit avec celle d'un autre shield. Ou encore plus rageant, les connecteurs des diffûˋrents shields partagent le ou les mûˆmes connecteurs de la carte Arduino.
Et je passe sur les problû´mes d'alimentation, d'interfûˋrences radio/ûˋlectriques, etc.
Disons que tout se passe bien si vous n'utilisez qu'un seul shield. Dû´s que vous commencez û vouloir les empiler, vous devez potasser la documentation constructeur (les data sheets) afin de dûˋtecter les ûˋventuels conflits.
Les fabricants proposent en principe sur leur site les documents nûˋcessaires û la mise en éuvreô : schûˋma ûˋlectrique, data sheet, exemple d'utilisation, etc.
Le site Internet http://shieldlist.org vous propose un moteur de recherche intûˋgrûˋ avec des centaines de rûˋfûˋrences pour choisir vos shields.
Pour chaque shield rûˋfûˋrencûˋ, vous trouverez les caractûˋristiques principales ainsi qu'un schûˋma d'allocation des broches bien utile.
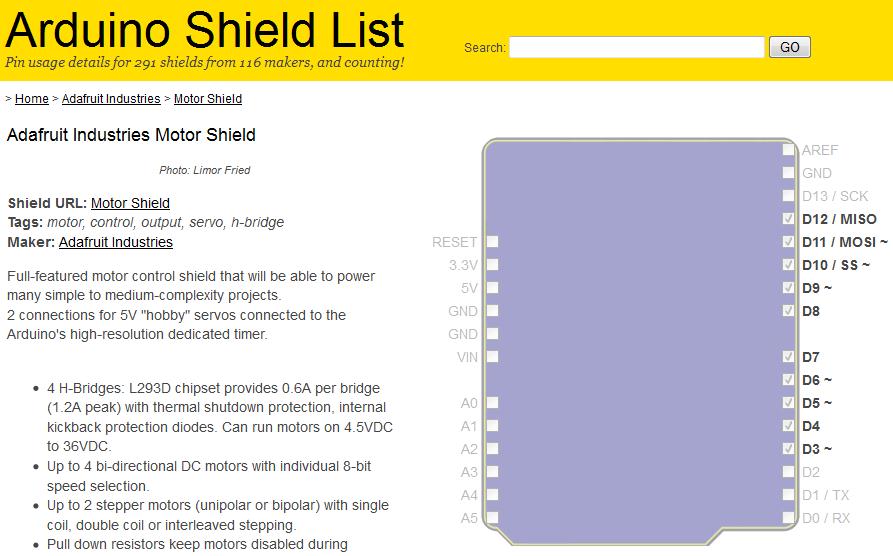
û noter que si l'allocation des broches du shield rend le nombre de connecteurs disponibles insuffisant pour d'autres utilisations, vous devrez probablement passer au modû´le supûˋrieur comme l'Arduino Mega qui dispose de connecteurs supplûˋmentaires et qui peut parfaitement recevoir les shields conûÏus initialement pour la Uno.
VI. Processing▲
Processing est un environnement de dûˋveloppement et un langage de programmation basûˋ sur le langage Java adaptûˋ û la crûˋation plastique et graphique interactive.
Pourquoi on vous parle de ûÏa maintenantô ?
Il nous suffit d'observer l'IDE Processing sur la copie d'ûˋcran ci-dessous. Cela ne vous rappelle rienô ?
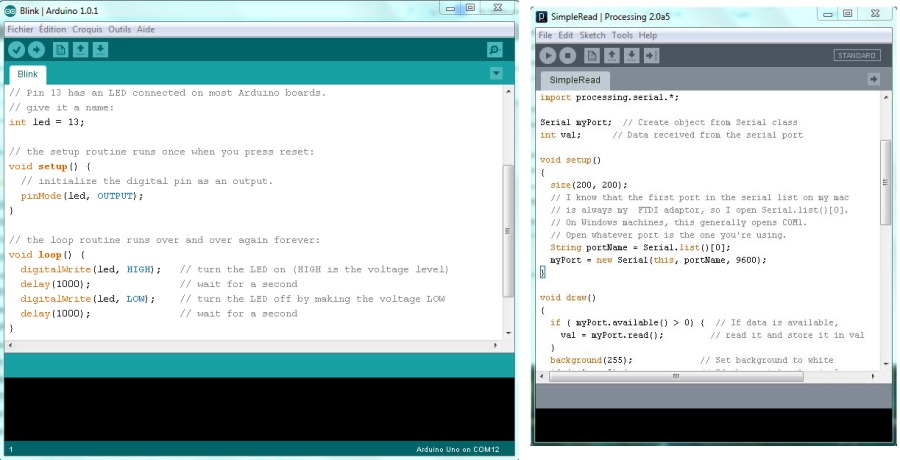
La philosophie de Processing est aussi la facilitûˋ. Outre ses dispositions pour le graphisme et le multimûˋdia, sa bibliothû´que Serial permet la communication sûˋrielle entre l'Arduino et l'ordinateur hûÇte. L'alliance parfaiteãÎ
Voici une vidûˋo de dûˋmonstration qui montre l'utilisation combinûˋe d'une carte Arduino Uno reliûˋe par un cûÂble USB û un PC muni du logiciel Processing.
Un module boussole ûˋlectronique est connectûˋ û la carte Arduino. Le programme implantûˋ dans le microcontrûÇleur se contente de rûˋcupûˋrer les donnûˋes du module (angle de rotation par rapport au nord) et les transmettre pûˋriodiquement par la liaison sûˋrie ûˋtablie via le cûÂble USB (port COM virtuel).
Le programme hûÇte Processing du PC rûˋcupû´re les donnûˋes numûˋriques pour animer l'aiguille de la boussole û l'ûˋcran.
Arduino et Processing, les deux font la paireãÎ Si vous maûÛtrisez l'un, l'autre vous sera dûˋjû familier.
VII. Conclusion▲
Comme vous avez pu le constater, ce qui prime dans Arduino, c'est sa simplicitûˋ qui permet de mettre en éuvre de nombreux objets numûˋriques û moindre coû£t sans ûˆtre un spûˋcialiste du fer û souder ou de la programmation des microcontrûÇleurs. C'est cette qualitûˋ-lû qui donne û Arduino le succû´s planûˋtaire qu'on lui connaûÛt.
Vous ûˆtes maintenant parûˋ û rûˋaliser votre premier prototype dans la deuxiû´me partie de ce tutorielô :
VIII. Remerciements▲
Je remercie vivement Bktero et deletme pour leur relecture technique et leurs conseils avisûˋs.
Merci ûˋgalement û Maxime et Benjamin ![]() pour leurs travaux sur la boussole ûˋlectronique et qui sont û l'origine de la vidûˋo.
pour leurs travaux sur la boussole ûˋlectronique et qui sont û l'origine de la vidûˋo.
Je remercie ûˋgalement l'ami ClaudeLELOUP pour sa relecture orthographique.
IX. Bibliographie et sitographie▲
IX-A. En langue franûÏaise▲
- http://fr.flossmanuals.net/arduino/ô : un manuel francophone û licence C.C trû´s complet, qui peut ûˆtre commandûˋ en version imprimûˋe, exportûˋ en PDF ou ePUB.
- http://www.mon-club-elec.fr/ô : le site de Xavier HINAULT, trû´s complet ûˋgalement avec des traductions en franûÏais du site officiel.
- Arduino - MaûÛtrisez sa programmation et ses cartes d'interface (shields) par Christian Tavernier.
- Processing - Le manuelô : le manuel du logiciel de crûˋation multimûˋdia, un complûˋment indispensable pour interfacer vos applications Arduino.
IX-B. En langue anglaise▲
- https://www.arduino.cc/ô : le site officiel.
- https://tronixstuff.com/tutorials/ô : le blog tronixstuff avec plus de 50 tutoriels pour Arduino.
- http://shieldlist.org/ô : un site rûˋfûˋrenûÏant des centaines de shields pour Arduino.
- Adafruit learning systemô : une sûˋrie de tutoriels pour dûˋbuter.
- Arduino Projects to save the World.
- http://www.arduinoevilgenius.com/arduino-projects-evil-genius-ed1/ô : 30 Arduino Projects for the Evil Genius, existe aussi gratuitement en version PDF.
