




I. Introduction▲
La rotation (du latin rotare: « tourner ») ou mouvement de rotation est l'un des deux mouvements simples fondamentaux avec le mouvement de translation rectiligne.
Un solide est en rotation si la trajectoire de tous ses points est un cercle dont le centre appartient à une même droite appelée « axe de rotation ».
Si on considère le seul mouvement de rotation de la Terre sur elle-même, les astronomes observent que :
- le nombre de rotations de la Terre sur elle-même est de 365,2425 par an environ (soit une rotation propre en 23 heures 56 minutes et 4 secondes environ) ;
- l'axe de rotation propre de la Terre est incliné d'environ 23° 26' par rapport au plan de l'écliptique (plan formé par l'orbite de la Terre en mouvement autour du Soleil) ;
- comme la Terre n'est pas à proprement parler un solide rigide indéformable et à cause de l'action combinée du Soleil et de la Lune (influence des marées), la position de l'axe de rotation et la vitesse de rotation oscillent suivant des cycles soigneusement définis, mesurés et consignés dans les bulletins de l'International Earth Rotation and Referece Systems Service.
Avant d'attaquer sereinement les mouvements de rotation, il est recommandé de s'approprier les bases de la cinématique puis de la dynamique du point matériel dans les tutoriels suivants :
La cinématique des mouvements monodimensionnels
II. Paramétrage▲
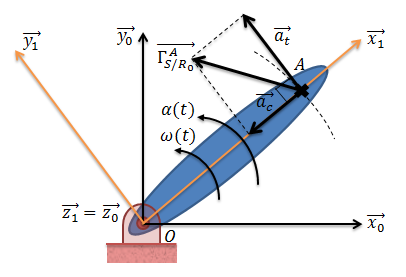
Afin de définir la position d'un solide (S) en mouvement de rotation autour d'un axe fixe, on attache respectivement au solide (S) et à la Terre les repères orthonormés directs ![]() et
et ![]() .
.
Le paramétrage de la position du solide (S) est donc le suivant :
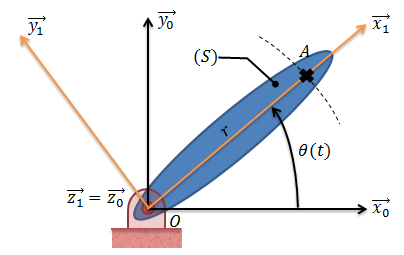
Le référentiel terrestre ![]() est supposé galiléen (ou inertiel).
est supposé galiléen (ou inertiel).
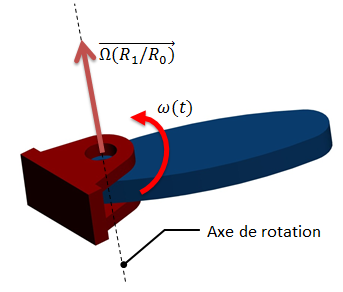
Le solide S est guidé en rotation autour de l'axe ![]() .
.
On accroche au solide S un repère mobile ![]() tel que
tel que ![]() .
.
La position angulaire est définie par l'angle ![]() , fonction du temps t et exprimée en radian(rad).
, fonction du temps t et exprimée en radian(rad).
On attache au solide (S) un point A dont la position est définie par ses coordonnées polaires![]() avec
avec ![]() .
.
III. Équations du mouvement▲
Ces équations sont très similaires à celles du mouvement de translation rectiligne (M.R.U. et M.R.U.A.).
III-A. Vitesse et accélération angulaire instantanée▲
On commence par définir la vitesse angulaire moyenne en rad/s entre deux instants t et t+dt :
Pour obtenir la vitesse angulaire instantanée à l'instant t, on passe à la limite :

Par analogie avec les mouvements de translation, on définit la vitesse angulaire comme la dérivée de la position angulaire.
Formule pratique :
étant donné que :
![]()
on démontre la formule qui permet
de convertir des
rad/s
en
tours/min
:
![]()
De la même façon, on définit l'accélération angulaire instantanée en rad/s2:

L'accélération angulaire est la dérivée de la vitesse angulaire, soit la dérivée seconde de la position angulaire.
III-B. Mouvement circulaire uniforme (M.C.U.)▲
Dans ce cas, à tout instant : ![]()
III-C. Mouvement circulaire uniformément varié (M.C.U.V.*)▲
* ou au choix M.C.U.A. pour mouvement circulaire uniformément accéléré.
Dans ce cas, à tout instant : ![]()
Si ![]() , on parle de mouvement circulaire uniformément accéléré.
, on parle de mouvement circulaire uniformément accéléré.
Si ![]() , on parle de mouvement circulaire uniformément décéléré.
, on parle de mouvement circulaire uniformément décéléré.
IV. Vitesse tangentielle et distribution des vitesses▲
IV-A. Dérivation temporelle d'un vecteur▲
Si on note(1) , les coordonnées du vecteur
, les coordonnées du vecteur ![]() dans le repère
dans le repère ![]() , on définit la dérivée temporelle par rapport au repère
, on définit la dérivée temporelle par rapport au repère ![]() , le vecteur :
, le vecteur :
Quelques propriétés utiles :
- si
 est fixe dans
est fixe dans  , alors
, alors  , comme pour les fonctions à valeurs scalaires ;
, comme pour les fonctions à valeurs scalaires ; - si
 ,
,  , comme tout bon produit ;
, comme tout bon produit ; - de même pour un produit scalaire de deux vecteurs :
 .
.
IV-A-1. Exemple de calcul▲
Le vecteur ![]() étant mobile dans
étant mobile dans ![]() , on cherche à déterminer l'expression du vecteur
, on cherche à déterminer l'expression du vecteur![]() .
.
Le lecteur peu familier avec la manipulation des équations pourra passer le développement qui suit et appliquer directement la formule de Bour du paragraphe suivant.
En projetant le vecteur ![]() dans le repère
dans le repère ![]() :
: ![]()
soit, ![]() .
.
Comme ![]() ,
,
![]()
On rappelle que
![]() .
Les mathématiciens préféreront sans doute l'écriture
.
Les mathématiciens préféreront sans doute l'écriture
![]() .
.
Ainsi, on démontre les relations :
-
![]() ;
;
-
![]() .
.
On reprend l'expression de ![]() précédente:
précédente:
![]() ,
,
soit :
![]() .
.
On obtient finalement :
On remarque que, à chaque instant, la dérivée du vecteur
![]() dans le repère fixe
dans le repère fixe
![]() est orthogonale à ce vecteur. On peut généraliser ce résultat à tout vecteur
est orthogonale à ce vecteur. On peut généraliser ce résultat à tout vecteur
![]() de norme constante (
de norme constante (
![]() est un vecteur unitaire,
est un vecteur unitaire,
![]() ).
).
En effet, pour tout vecteur
![]() de norme constante :
de norme constante :
![]()
Comme
![]() , on a, puisque cette dérivée est nulle,
, on a, puisque cette dérivée est nulle,
![]() .
.
Soit :
![]() , par définition du produit scalaire.
, par définition du produit scalaire.
IV-A-2. Vecteur vitesse de rotation - formule de Bour▲
On définit le vecteur vitesse de rotation (ou vecteur de Poisson): ![]() .
.
Ce vecteur vitesse de rotation du repère ![]() par rapport au repère
par rapport au repère ![]() est le vecteur :
est le vecteur :
- ayant pour direction l'axe de rotation
 ;
; - dont le sens est déterminé par les règles conventionnelles d'orientation (que l'on peut déterminer par différents moyens mnémotechniques comme la règle des trois doigts de la main droite, règle du tire-bouchon ou autres) ;
- dont la norme est la vitesse angulaire, fonction du temps t .
On reprend la relation obtenue précédemment :  .
.
En remarquant que ![]() , on obtient :
, on obtient : ![]() .
.
Cette relation peut être utilisée afin de généraliser la dérivation temporelle d'un vecteur quelconque par rapport à un repère inertiel. On donne sans démonstration la formule utile, appelée formule de Bour (ou formule de Poisson)(2):
On remarquera que le choix du repère de dérivation est important.
|
|
IV-B. Vitesse tangentielle▲
On cherche à définir l'expression du vecteur vitesse du point A appartenant au solide S en mouvement de rotation par rapport au repère ![]() :
:

On sait déjà que le vecteur vitesse s'obtient par dérivation du vecteur position :
avec la formule de Bour,

soit :
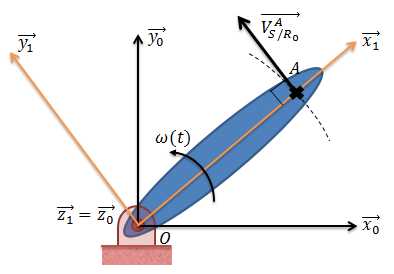
Le vecteur vitesse est tangent à la trajectoire (c'est-à-dire perpendiculaire à ![]() ), orienté suivant le sens du mouvement de rotation et de norme :
), orienté suivant le sens du mouvement de rotation et de norme :
IV-C. Distribution des vecteurs vitesse▲
Le résultat précédent montre que la norme de la vitesse tangentielle augmente proportionnellement avec la distance au centre de rotation (au centre de rotation, la vitesse tangentielle est même nulle).
On voit sur la figure ci-dessous que la roue à l'extérieur du virage du véhicule automobile engagé dans un virage circulaire doit tourner plus vite que la roue intérieure si on souhaite éviter le glissement des pneumatiques sur le sol et conserver une certaine stabilité dans la conduite du véhicule.
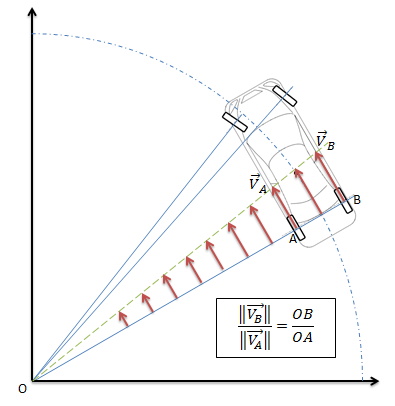
Le différentiel monté sur l'axe des roues motrices (à l'arrière du véhicule) est un mécanisme permettant justement de répartir dynamiquement les vitesses de rotation aux deux roues en fonction de la courbure du virage.
V. Accélération tangentielle et centripète▲
On a déjà vu que l'accélération pouvait être obtenue par dérivation de la vitesse, soit :
On utilise à nouveau la formule de Bour :

avec 
et ![]() ,
,
il vient :

![]() est la composante tangentielle de l'accélération.
est la composante tangentielle de l'accélération.
![]() est la composante centripète de l'accélération.
est la composante centripète de l'accélération.
Si le mouvement de S est un mouvement de rotation uniforme (M.C.U.), c'est l'accélération angulaire
![]() qui est nulle à tout instant.
qui est nulle à tout instant.
Le point A lié au solide S reste néanmoins accéléré avec une accélération non nulle réduite à sa composante centripète :
![]()
VI. Retour à la dynamique et aux lois de Newton▲
VI-A. Force centripète▲
Rappelons l'énoncé de première loi de Newton :
Tout corps persévère dans l'état de repos ou de mouvement uniforme en direction, à moins qu'une force n'agisse sur lui et ne le contraigne à changer d'état.
Maintenant, imaginons un dispositif constitué d'un point matériel (de masse m) accroché en M au bout d'un fil et tournant autour d'un axe de rotation (O,z) fixe.
On suppose que le point matériel est animé d'un mouvement de rotation uniforme (M.C.U.), de sorte que son accélération est réduite à sa seule composante centripète ![]() .
.
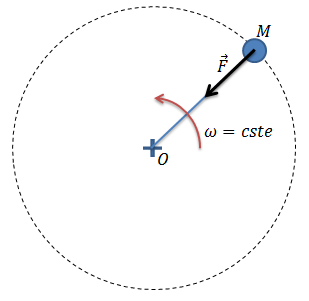
Le mouvement n'étant pas la ligne droite, le point matériel ne peut être libre. Il est soumis à une force que l'on détermine avec l'équation fondamentale de la dynamique (deuxième loi de Newton) :

Cette force centripète induite par la tension du fil et dirigée vers le centre de rotation tend à maintenir le point matériel sur sa trajectoire circulaire.
VI-B. Force centrifuge▲
On considère à nouveau un véhicule automobile prenant un virage circulaire de rayon r. Supposons que, en situation de virage, le mouvement du véhicule est un mouvement circulaire uniforme (M.C.U.) de façon à ce que, là encore, l'accélération du centre de gravité soit réduite à sa composante centripète ![]() .
.
Changeons de point de vue en imaginant une webcam fixée dans l'habitacle de la voiture et observant un passager assis et sans ceinture de sécurité (situé en G pour simplifier).
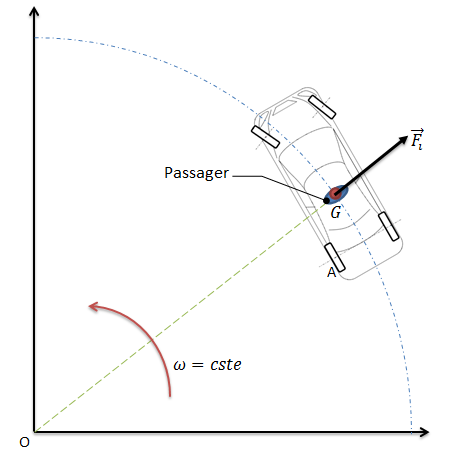
Le spectateur de la vidéo enregistrée verrait immanquablement le passager s'incliner, voire se faire éjecter, vers l'extérieur du virage, soumis à une force mystérieuse.
Comme cela a déjà été expliqué dans le chapitre III-B. Un référentiel d'inertie dans le cas du mouvement de translation, le phénomène provient du fait du changement de point de vue dans un référentiel accéléré ![]() (non inertiel) où l'équation fondamentale de la dynamique doit prendre en compte des forces apparentes "d'inertie" :
(non inertiel) où l'équation fondamentale de la dynamique doit prendre en compte des forces apparentes "d'inertie" :

la force d'inertie (nommée force centrifuge dans le cas du mouvement de rotation) est due à l'accélération du repère :

Seuls les joueurs de notre XV de France ("all-white") semblent échapper aux lois de la physique, mais ces gens-là jouent sur une autre planète, non ?
Pub Renault XV de France (2011)
Si la force centrifuge constitue un côté fâcheux dans le cas du passager, elle peut être avantageusement utilisée dans de nombreuses applications technologiques.
On évoque, par exemple, le cas du régulateur centrifuge d'un aérogénérateur bipale :
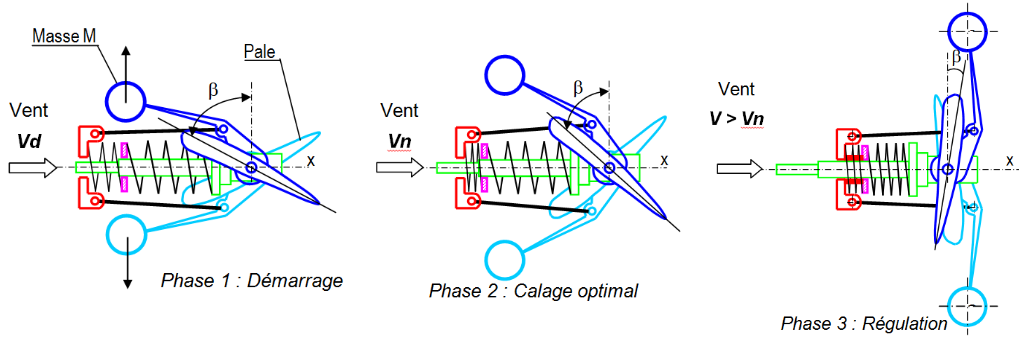
Lors du démarrage de la rotation des pales autour de l'axe x (phase 1), l'orientation de celles-ci (angle de calage β sur la figure) par rapport à la direction du vent permet une portance aérodynamique maximale sur les pales qui se mettent à tourner.
La rotation engendre une force centrifuge sur les masses M qui tend à les éloigner de l'axe de rotation et donc à faire diminuer l'angle de calage β (phase 2).
Si la vitesse de rotation devient trop élevée, l'inclinaison est telle que les pales "décrochent" aéorodynamiquement et la vitesse de rotation tend à diminuer (phase 3).
C'est cet asservissement dynamique obtenu grâce à l'effet centrifuge qui permet la régulation de la vitesse de rotation des pales autour d'une vitesse nominale Vn.
VII. Conclusion▲
Dans ce tutoriel, on s'est limité volontairement au cas du point matériel en mouvement de rotation autour d'un axe fixe.
Même si on avance un peu plus chaque fois dans la compréhension des phénomènes physiques, il reste encore bien des étapes avant de généraliser la dynamique (ne serait-ce que dans sa formulation newtonienne) au cas du solide rigide en mouvement relatif quelconque.
Le chemin est donc encore long afin de prendre en compte tout le cadre général de la mécanique newtonienne dans l'implémentation ou l'utilisation du moteur physique de vos futures applications 2D/3D.
Merci à dourouc05 et à son chat tout plein de pattes pour leur aide très précieuse dans la rédaction de mon premier article. Je remercie également ClaudeLELOUP pour sa relecture orthographique.