



I. Introduction¬†: les kits Cypress PSoC et l‚ÄôEDI PSoC Creator▲
Les Socs du fabricant de semi-conducteurs am√©ricain Cypress (acquis r√©cemment par le groupe Infineon), appel√©s PSoC pour Programmable System on Chip, sont des circuits int√©gr√©s rassemblant sur une seule puce √† microcontr√īleur¬†: un CPU (ARM Cortex 32 ou 64 bits), de la m√©moire statique et dynamique, des entr√©es-sorties, parfois avec divers modules pour la communication sans fil (Wi-Fi, Bluetooth‚Ķ), des capteurs et toute une gamme de p√©riph√©riques et d‚Äôunit√©s fonctionnelles analogiques et num√©riques.
La particularit√© des PSoC en plus d‚Äô√™tre programmables, est qu‚Äôils pr√©sentent des unit√©s configurables, ce qui permet aux ing√©nieurs et makers de concevoir des sous-syst√®mes c√Ębl√©s mixtes, num√©riques ou analogiques, d√©chargeant le CPU de t√Ęches co√Ľteuses ou r√©p√©titives.
Pour vous donner un aper√ßu sur l‚Äôarchitecture des PSoC, imaginez le code suivant implant√© dans un microcontr√īleur classique¬†:
if (Input1_Read() && !Input2_Read()){
LED_Pin_Write(1); // Allumer LED
}
else {
LED_Pin_Write(0); // Eteindre LED
}Au lieu de ce code, vous pouvez r√©aliser le sch√©ma simple ci-dessous en c√Ęblant des portes logiques dans PSoC Creator¬†:
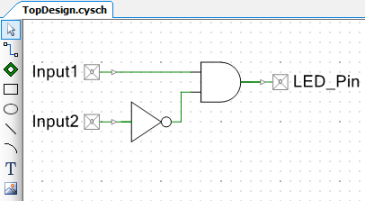
√Ä la g√©n√©ration du projet, les unit√©s logiques du processeur PSoC sont reconfigur√©es afin d‚Äôactiver les portes logiques, et les entr√©es-sorties sont rout√©es suivant les indications du sch√©ma. Avec ce s√©quenceur c√Ębl√©, aucun cycle n‚Äôest consomm√© par le CPU.
Pour découvrir les kits de développement PSoC de Cypress et leur EDI PSoC Creator, vous pouvez consulter les tutoriels suivants :
Ainsi, même si la communauté Arduino continue de grandir, je reste fidèle à ma carte PSoC 4 et son EDI (Environnement de Design Intégré) PSoC Creator.
La carte CY8CKIT-042 du PSoC¬†4 Pioneer Kit que je ressors donc √† nouveau pour l‚Äôoccasion comporte une glissi√®re axiale (slider) sensitive en surface de la carte sur le c√īt√©.

Les applications de cette glissière sont nombreuses. On peut par exemple reproduire le fonctionnement d’une roulette mécanique pour faire monter ou descendre quelque chose (un store déroulant, un niveau sonore ou de luminosité, etc.)
Dans cet article, on propose de d√©couvrir comment exploiter le contr√īleur CapSense pour les boutons sensitifs √† d√©tection capacitive dans l‚ÄôEDI PSoC Creator.
II. Les boutons m√©caniques vs boutons sensitifs▲
Les boutons mécaniques restent encore largement utilisés, mais ils présentent pourtant des inconvénients :
- ils deviennent moins fiables et s'usent avec le temps à cause des parties mécaniques en mouvement ;
- l'humidité et la poussière s'infiltrent à cause des jeux de fonctionnement entre les parties fixes et mobiles du bouton ;
- conséquence de l'usure et de l'encrassement des contacts avec le temps, il faut appuyer de plus en plus fort sur le bouton ;
- un bouton m√©canique est un assemblage de pi√®ces co√Ľteuses √† fabriquer avant de les assembler¬†;
- pour loger les boutons, il faut souvent d√©couper des ouvertures dans des panneaux ou dans les coques de bo√ģtier¬†;
- pour couronner le tout, ils ne sont pas toujours très esthétiques.
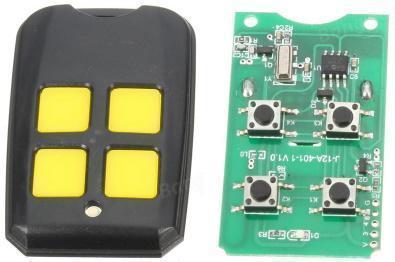
√Ä c√īt√© de cela, une infime pression, voire un simple effleurement du doigt sur un bouton sensitif suffit pour d√©clencher une action. Vous retrouvez maintenant ces dispositifs sensitifs sur de nombreux appareils modernes¬†: smartphones, tablettes, imprimantes, cha√ģnes Hi-Fi, √©crans plats, produits √©lectrom√©nagers, etc.
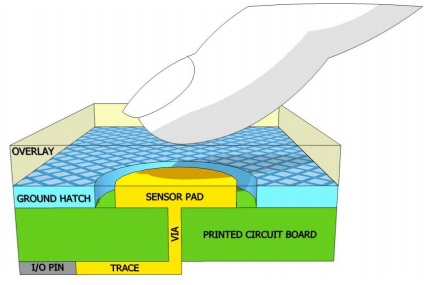
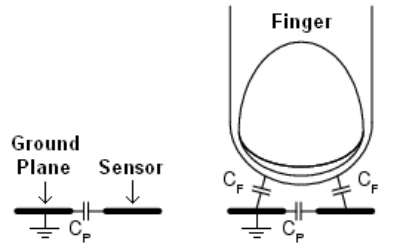
La technologie d√©velopp√©e par Cypress (nomm√©e CapSense¬ģ) permet la d√©tection de la perturbation de capacit√© √©lectrique √† l'approche du doigt¬†:
L‚Äô√©lectronique du contr√īleur et le firmware fournis par le constructeur permettent une d√©tection fiable avec une grande immunit√© aux bruits. Le syst√®me est capable de filtrer les ¬ę¬†fausses touches¬†¬Ľ dues par exemple √† la projection de liquide sur la surface sensitive.

III. Technologie CapSense▲
Ainsi, lorsque vous approchez votre doigt du revêtement conducteur (overlay), la capacité parasite initiale CP en l’absence de toucher entre les électrodes augmente pour devenir : CS=CP+CF
Un circuit spécialisé permet d'adapter le signal analogique perturbé par un changement de capacité en une valeur numérique issue d'un comptage d'impulsions (valeur nommée raw count) :
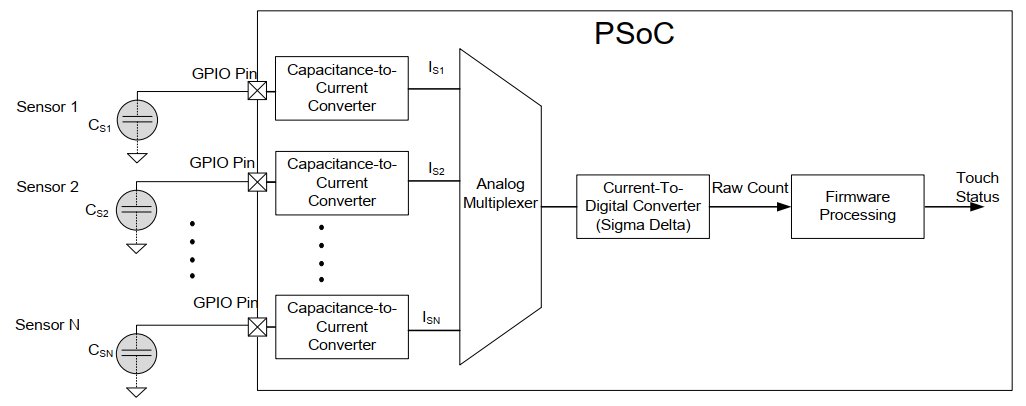
Par exemple, quand le doigt s'approche du capteur, la capacité CS augmente ce qui génère une augmentation du courant électrique dans le circuit. Un signal modulé dont la fréquence augmente est alors produit, et on compte le nombre d’impulsions dans une fenêtre de temps pour en sortir une valeur numérique :
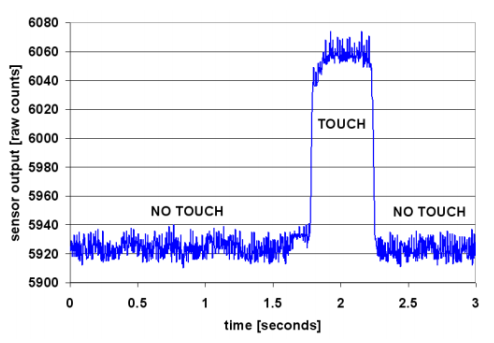
L’augmentation de la valeur produite en sortie à l’approche du doigt est donc proportionnelle à l'augmentation de la capacité en pF (picofarad). Le firmware traite alors l’information et est capable d’interpréter s’il y a détection d'une touche ou non.
IV. Les touches sensitives dans les kits Cypress PSoC▲
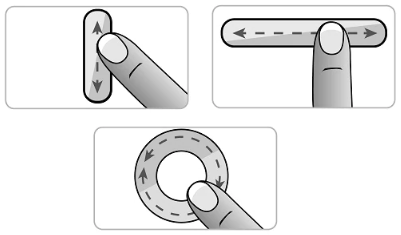
Cypress propose de nombreux kits √©quip√©s de touches sensitives CapSense, notamment sur ses cartes de d√©veloppement √† microcontr√īleur PSoC¬†4. Si mon kit r√©f√©renc√© CY8CKIT-042 comprend une glissi√®re axiale, le kit CY8CKIT-044, par exemple, permet la d√©tection de mouvements plus complexes (control gesture) avec la forme et la disposition particuli√®re de ses cinq boutons sensitifs¬†:

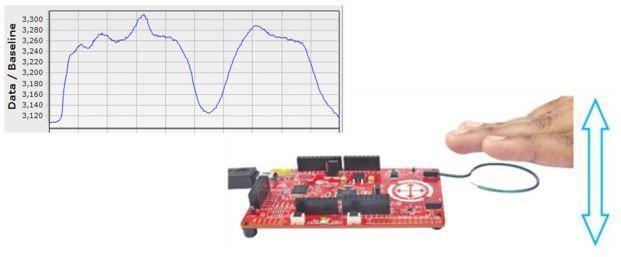
Avec ce m√™me kit, deux ports disponibles sur le c√īt√© de la carte permettent la mise en Ňďuvre d‚Äôune d√©tection de proximit√© capacitive¬†:
Le plus récent CY8CKIT-062-BLE (32-bit ARM Cortex-M4 PSoC 6) est équipé d’une glissière axiale et de deux boutons sensitifs CapSense :

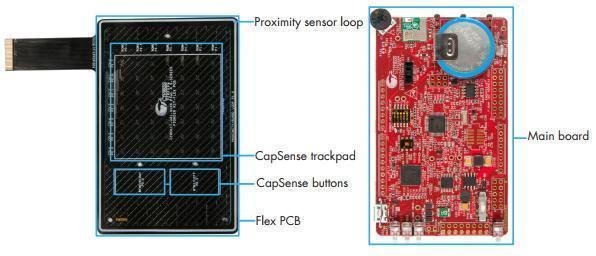
Plus original, le kit CY8CKIT-041-41XX PSoC 4100S quant √† lui comprend une carte embarqu√©e PSoC¬†4100S √† clipser dans un bo√ģtier¬†:

Le bo√ģtier est ferm√© avec une surface sensitive raccord√©e √† la carte par une nappe. Celle-ci comporte des boutons ainsi qu‚Äôun trackpad CapSense (compos√© de 7x7 zones sensitives), et permet la d√©tection de proximit√©¬†:
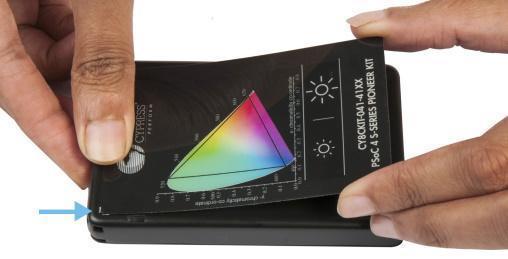
Il reste à recouvrir la surface d’un film personnalisé, ici pour une application de sélection de couleur pour allumer une LED, et de téléverser son application via la prise USB depuis PSoC Creator :

L’API propose alors des fonctionnalités avancées de type Trackpads with gestures pour la reconnaissance de mouvements tels que : scroll, flick, swipe, zoom, rotate… avec un ou deux doigts.
V. R√©glage et optimisation des performances (tuning)▲
La qualité de la détection des touches dépend de nombreux facteurs : fabrication du circuit imprimé, matériau et épaisseur de la couche de revêtement de la zone sensitive, dimensions et formes du bouton, environnement extérieur, etc. Certains réglages internes au fonctionnement du modulateur CSD ou des paramètres du firmware relatifs au traitement des valeurs brutes produites en sortie (Raw Count) vont aussi influencer la sensibilité.
Tout le processus de réglage (tuning) consiste justement à déterminer les valeurs optimales des paramètres et de maintenir la meilleure sensibilité possible au toucher quelles que soient les perturbations qui peuvent se produire dans l'environnement du bouton sensitif.
Comme le processus d'optimisation est un processus it√©ratif co√Ľteux en temps dans le cycle de d√©veloppement, Cypress a mis au point le proc√©d√© SmartSense¬ģ, un ensemble d'algorithmes d'auto√©talonnage (auto-tuning) afin de compenser automatiquement les variations d'environnement et garder des performances optimales.
Afin de comprendre les principaux réglages du capteur CapSense, voyons quelques définitions.
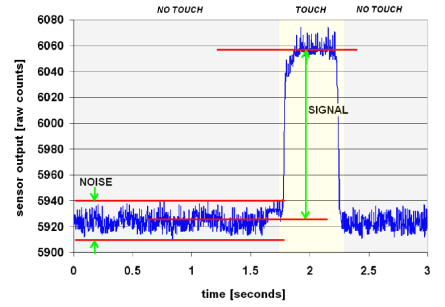
Raw Count : comme cela a été dit précédemment, les algorithmes et matériels CapSense traduisent la variation de capacité au moment du toucher en une valeur numérique produite en sortie (comptage d'impulsions). Cette valeur numérique brute permettra d'indiquer l'état du capteur après traitement.
Baseline ‚Äď (niveau de r√©f√©rence)¬†: une r√©f√©rence doit √™tre √©tablie en l‚Äôabsence de toucher √† partir des donn√©es filtr√©es. En faisant la diff√©rence entre les donn√©es brutes et le niveau de r√©f√©rence (raw count - baseline), on obtient un nouveau signal qui permettra aux algorithmes de prendre une d√©cision concernant la d√©tection de touches.
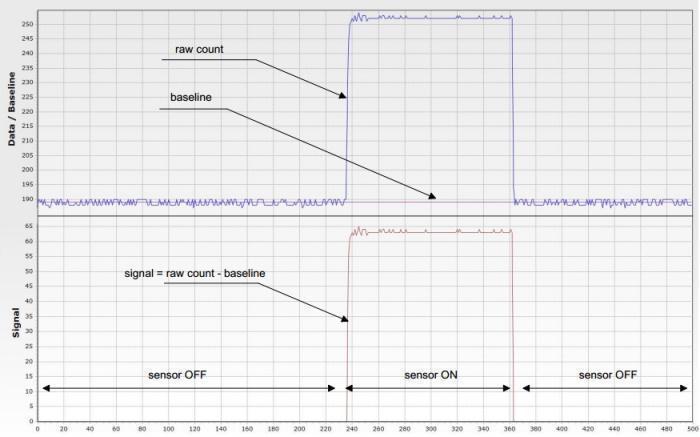
Seulement, cette référence peut dériver en fonction des changements d’environnement autour du bouton sensitif (température, humidité, perturbations électromagnétiques, etc.) et un soin doit donc être apporté à la mise à jour de la baseline.
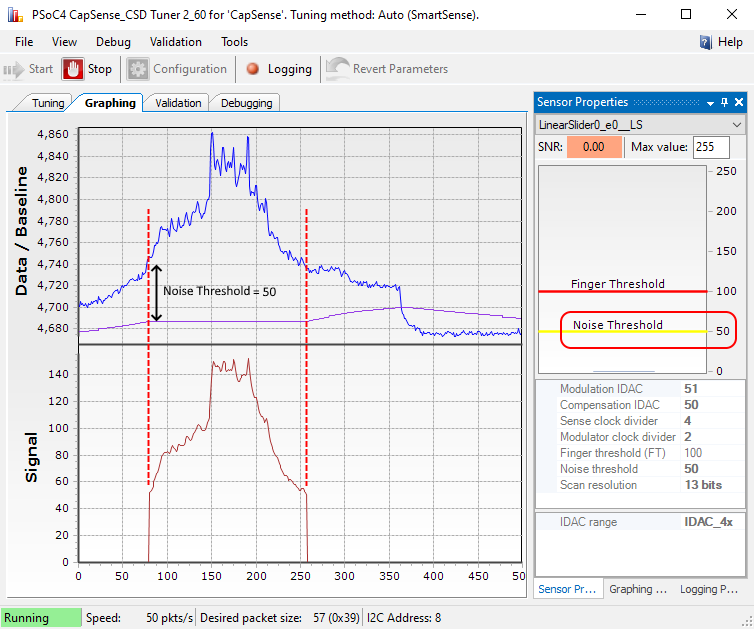
Pour cela, le param√®tre Noise Threshold (seuil de bruit) permet de diff√©rencier le signal, du bruit. Si la variation du signal par rapport √† la r√©f√©rence est en dessous de ce seuil, le syst√®me consid√®re que la faible variation n‚Äôest pas due √† l‚Äôapproche d‚Äôun corps, mais √† du bruit ou une d√©rive du signal et la baseline est mise √† jour¬†; le signal (raw count ‚Äď baseline) reste alors 0. Dans le cas contraire, il s‚Äôagit d‚Äôun corps qui s‚Äôapproche et la baseline est maintenue au niveau relev√© juste avant la d√©tection de l‚Äôapproche du corps, jusqu‚Äô√† ce que le signal redescende quand le corps s‚Äô√©loigne du bouton.
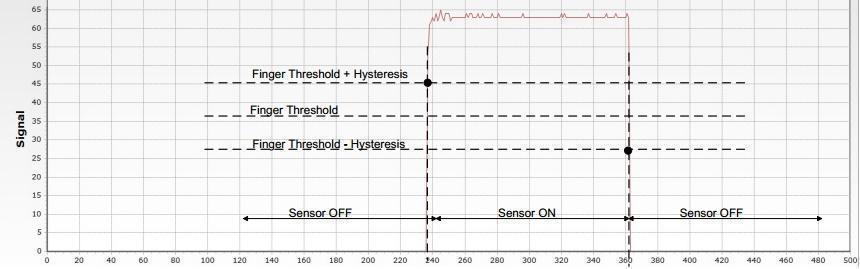
Finger Threshold ‚Äď (seuil de d√©tection de touche)¬†: un param√®tre associ√© au param√®tre Hysteresis pour d√©terminer l‚Äô√©tat de d√©tection ON/OFF du capteur avec l‚Äô√©quation¬†:
√Čtat du capteur =
- Touch ON, si Signal ‚Č• Finger Threshold + Hysteresis
- Touch OFF, si Signal ‚ȧ Finger Threshold ‚ąí Hysteresis
Pour maintenir les performances optimales et s’adapter aux dérives et sources de bruit extérieures, le procédé SmartSense prend en charge de gérer automatiquement la grande majorité des 17 paramètres requis pour le fonctionnement d’un capteur sensitif CapSense. Le bruit peut être mesuré en permanence et les différents paramètres ou seuils sont ajustés dynamiquement afin de maintenir le rapport signal-bruit (Signal-to-Noise Ratio) le plus élevé possible et éviter ainsi la détection de fausses touches.
Dans les quelques cas particuliers o√Ļ l‚Äôauto-tuning SmarSense ne donne pas des r√©sultats satisfaisants, il vous reste la possibilit√© d‚Äôajuster les param√®tres manuellement (Manual-tuning). Il faudra alors vous reporter aux proc√©dures pas-√†-pas de r√©glages manuels fournies par Cypress (voir la documentation en annexeAnnexe - Documentation Cypress, en particulier le CapSense Design Guide).
VI. Les Widgets CapSense▲
Un widget désigne un bouton ou un ensemble de boutons sensitifs qui peuvent être de formes différentes, et agencés de façon à former une interface tactile particulière avec l’utilisateur : un bouton simple, une matrice de boutons, un pavé tactile (touchpad), une glissière axiale ou radiale, etc.
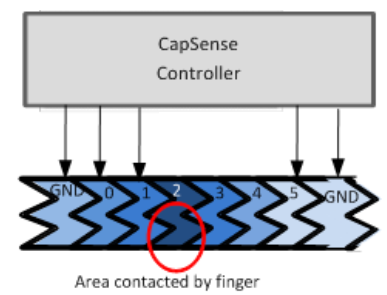
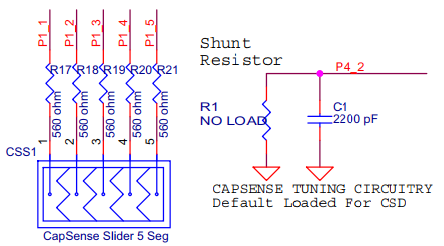
La carte référencée CY8CKIT-042 dont je dispose comprend une rangée de cinq segments sensitifs en double chevron pour former une glissière axiale (ports P1[1] à P1[5]) :

La forme en double chevron de la touche n’est pas due au hasard. Le but est d’obtenir une réponse linéaire de la position estimée du doigt lorsque celui-ci balaye la glissière sur son axe.
Idéalement, lorsque le doigt parcourt la glissière d’une extrémité à l’autre, il y a recouvrement des signaux de deux segments adjacents comme indiqué dans la figure ci-dessous :
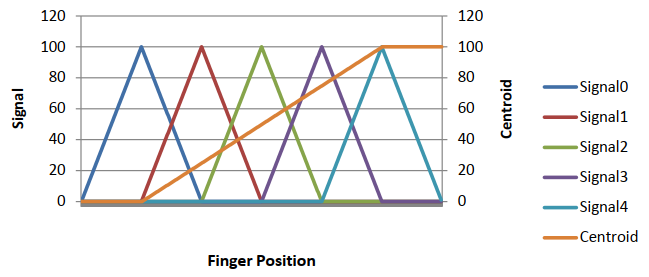
Il est difficile d‚Äôobtenir une r√©ponse lin√©aire en pratique, et la forme en double chevron des touches est ce qui permet de s‚Äôen approcher le plus, mais il faut alors prendre en compte les signaux sur trois segments adjacents pour estimer pr√©cis√©ment la position du centro√Įde (centre de l‚Äôaire de contact).
Sur l‚Äôimage ci-dessus, le signal sera le plus fort sur le segment 2, mais l‚Äôalgorithme CapSense va regarder la force des signaux sur les segments adjacents 1 et 3 pour calculer le centre de l‚Äôaire de contact (ou ¬ę¬†centro√Įde¬†¬Ľ) avec la formule¬†:

Dans l’exemple ci-dessous, le signal est maximal sur le segment 1 (donc X=1, et n=5 pour 5 segments), mais les segments adjacents 0 et 2 sont aussi impactés.
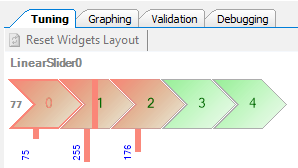
La position du centro√Įde peut √©voluer ici entre la position 0 et 255 (resolution=255 par d√©faut). Avec mon doigt quelque part sur le segment 1, la position du centro√Įde est¬†:
kitxmlcodelatexdvp\left( \frac{176-75}{75+255+176}+ 1 \right) \times \frac{255}{5-1} = 77finkitxmlcodelatexdvpVII. L‚ÄôAPI CapSense dans PSoC Creator▲
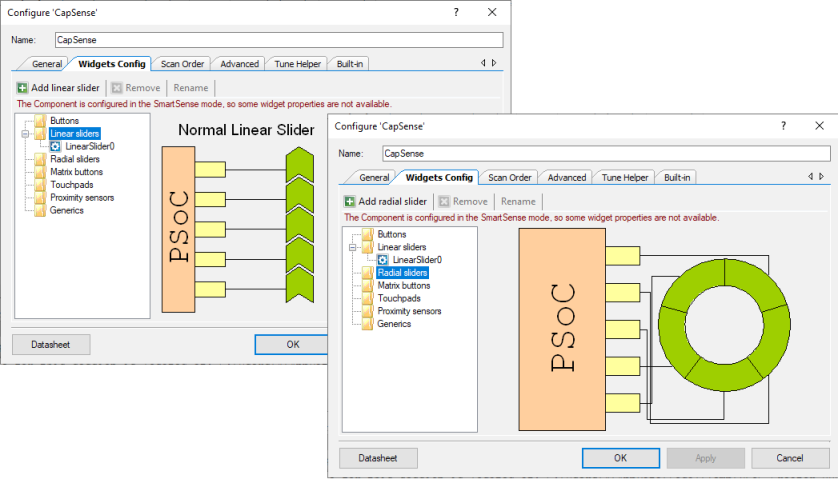
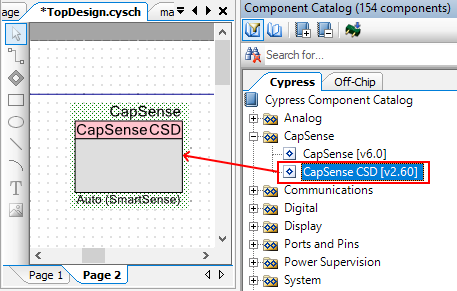
Pour mettre en Ňďuvre un widget CapSense, il suffit de faire glisser le bloc correspondant depuis le catalogue des composants dans la fen√™tre TopDesign de PSoC Creator.
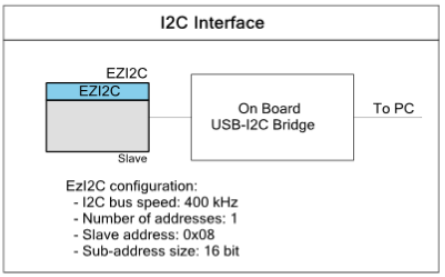
On y d√©pose √©galement un bloc de communication en mode EzI2C. Gr√Ęce √† lui, le contr√īleur CapSense pourra envoyer des donn√©es et les transmettre au PC via le c√Ęble USB en mode Tuning pour visualiser l‚Äô√©tat du widget dans une interface graphique et tracer des courbes.
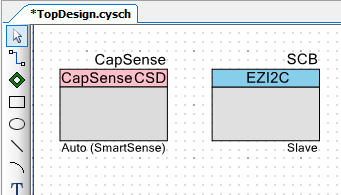
Dans la fenêtre TopDesign, on a finalement :
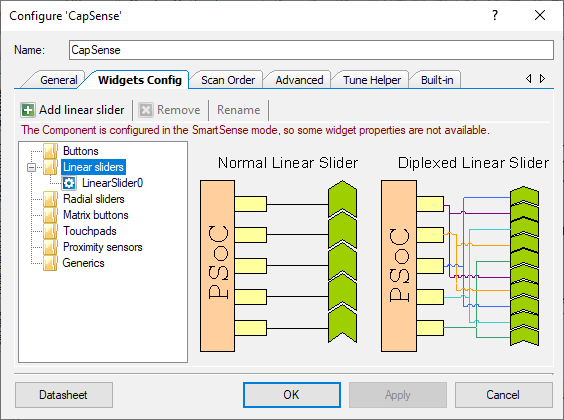
Dans le bloc CapSense, on commence par configurer le widget Linear Slider :
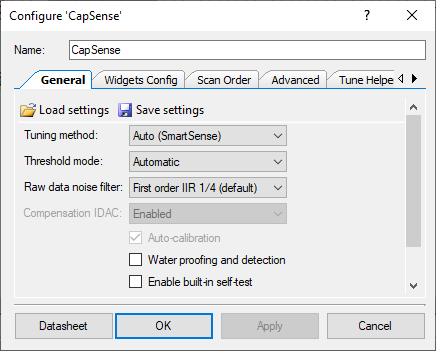
Puis on active le tuning en mode automatique SmartSense :
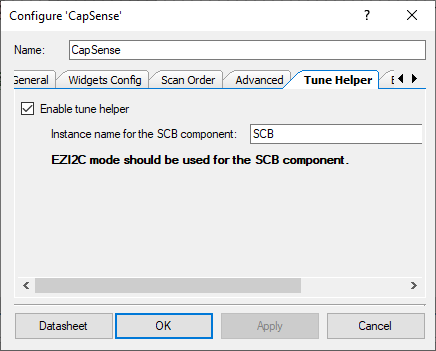
Enfin, on renseigne le nom du bloc de communication qui transmettra les données au PC :
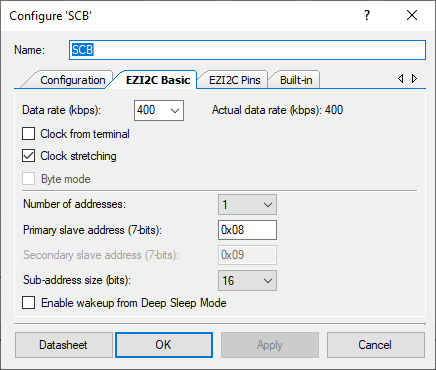
Le bloc de communication (SCB pour Serial Communication Bloc) configuré en mode EzI2C recevra les paramètres suivants :
Le programme minimal pour visualiser l’état du widget sur le PC est le suivant :
#include "project.h"
int main(void)
{
CyGlobalIntEnable; /* Enable global interrupts. */
CapSense_TunerStart();
while(1)
{
CapSense_TunerComm();
}
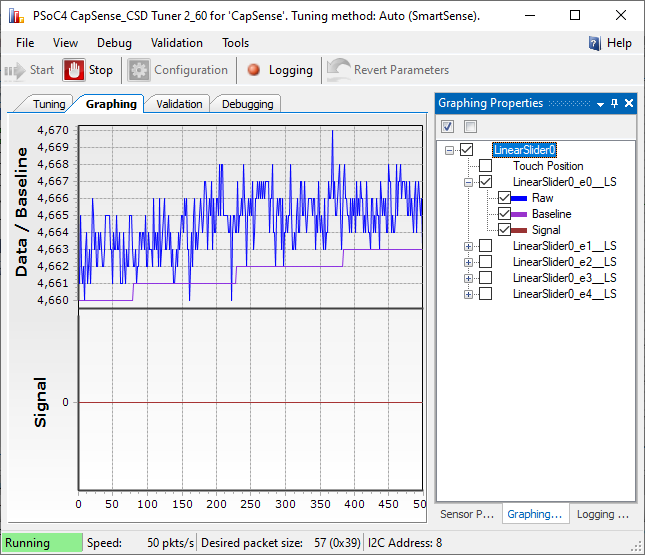
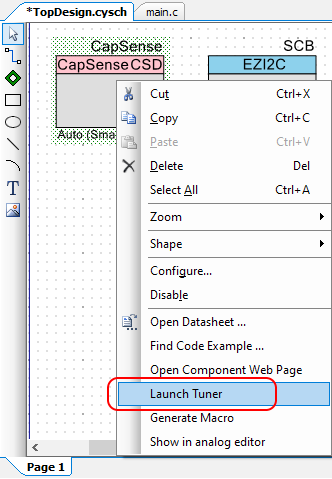
}Une fois le programme téléversé dans la carte, on lance le Tuner :
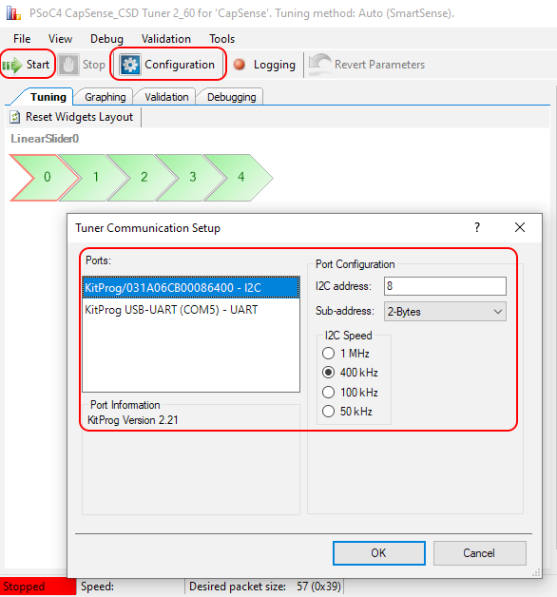
Il reste √† configurer les param√®tres de communication, et d√©marrer le tuning en cliquant sur ¬ę¬†Start¬†¬Ľ¬†:
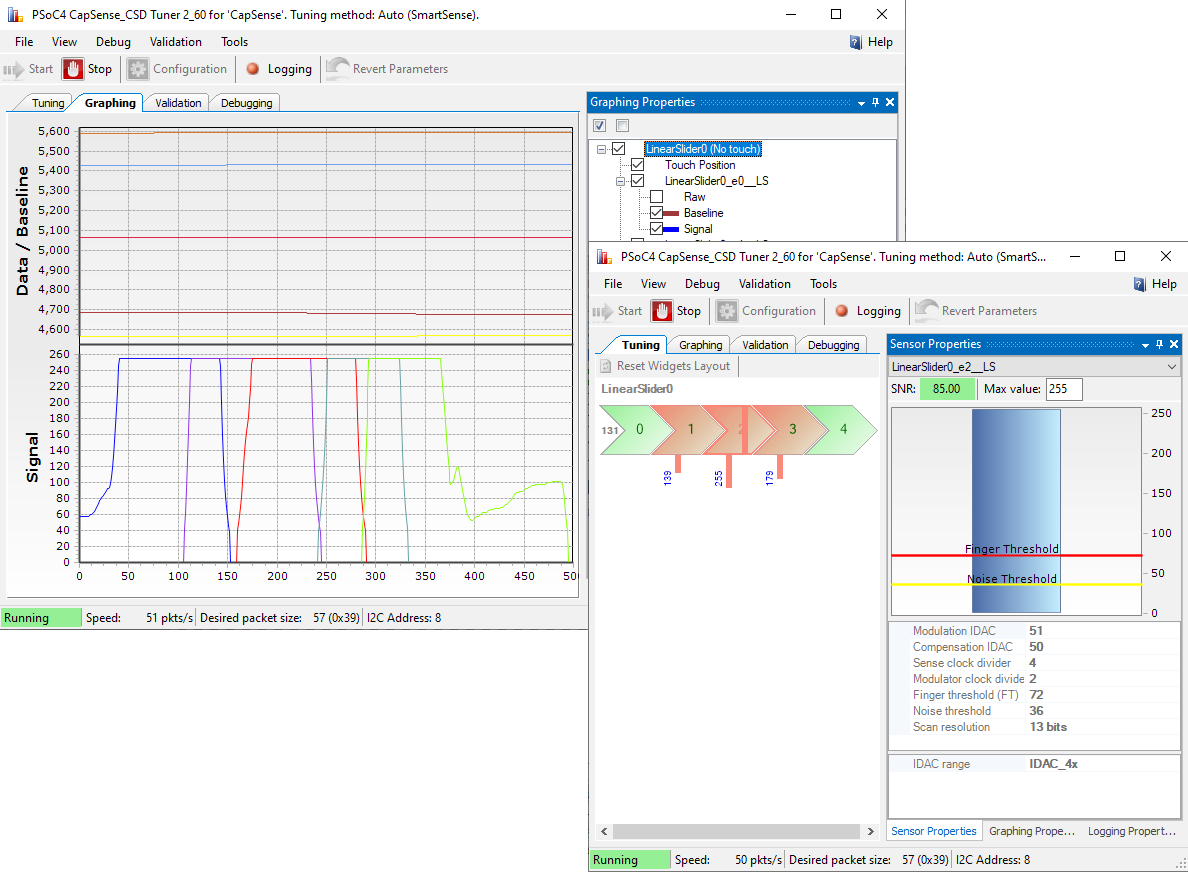
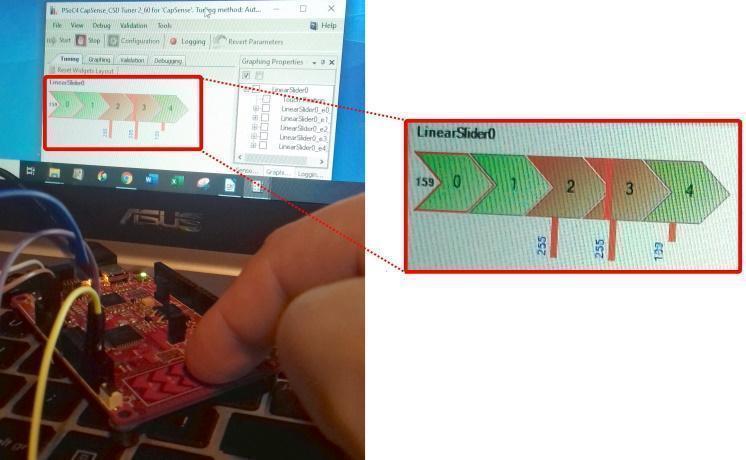
En mode Tuning, vous avez accès aux caractéristiques du widget en temps réel :
- position du centro√Įde¬†;
- rapport signal-bruit (SNR) par segment ;
- franchissement des seuils par segment (noise threshold, finger threshold) ;
- tracé des signaux segment par segment…
VIII. Exemple d‚Äôutilisation▲
Afin de d√©montrer les possibilit√©s, on propose une petite application o√Ļ la glissi√®re sensitive reproduit le fonctionnement d‚Äôune roulette m√©canique pour faire monter ou diminuer la valeur d‚Äôun compteur. Un afficheur √† LED 7-segments (8 digits) rendra compte de la valeur du compteur en temps r√©el.

VIII-A. Design de l‚Äôapplication▲
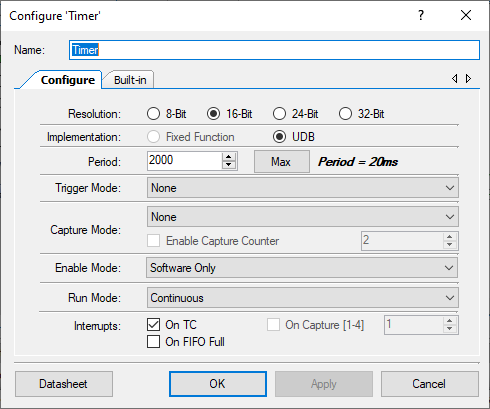
En plus des deux blocs CapSense et EzI2C vus précédemment, les composants Timer et interrupt (isr) sont déposés dans la fenêtre de travail afin de cadencer l’acquisition des données de la glissière par interruption, 50 fois par seconde :
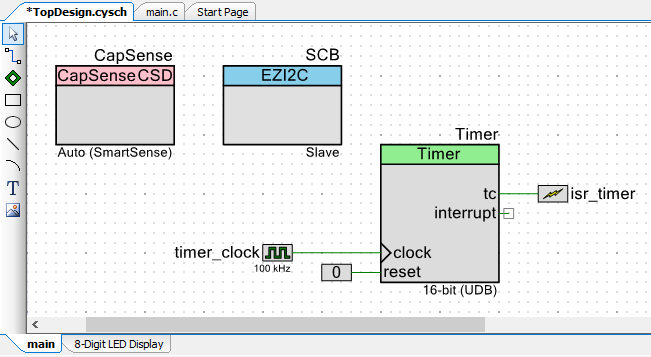
Avec l’horloge de 100 kHz, la période est réglée sur 20 ms et un signal d’interruption est déclenché en continu à chaque fin de comptage d’une période (Interrupts : On Terminal Count) :
L’API du composant Interrupt (nommé isr_timer ici) propose une fonction isr_timer_StartEx() et une macro CY_ISR pour configurer la table des vecteurs d’interruption avec l’adresse de la routine fournie en paramètre.
CY_ISR(myInterrupt) {
// Ici, le code de l’interruption
}
int main(void)
{
CyGlobalIntEnable; /* autoriser les interruptions */
/* Initialisation, démarrage */
Timer_Start();
isr_timer_StartEx(myInterrupt); /* myInterrupt, adresse de la routine d’interruption */
// ...
}De la sorte, la position du centro√Įde de la glissi√®re est acquise toutes les 20¬†ms gr√Ęce √† la fonction CapSense_GetCentroidPos()¬†:
/* Code d'interruption */
CY_ISR(myInterrupt) {
if (! CapSense_IsBusy()){ /* Si acquisition CapSense terminée */
flag = 1; /* On prévient le programme principal pour autres traitements */
oldsliderval = sliderval; /* Sauvegarde de la position pr√©c√©dente du centro√Įde */
sliderval = CapSense_GetCentroidPos(CapSense_LINEARSLIDER0__LS); /* Nouvelle position du centroide */
}
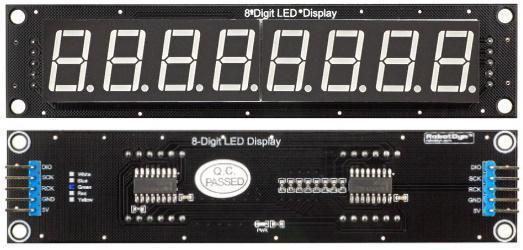
}Dans un deuxi√®me onglet de la fen√™tre TopDesign, on configure trois broches en sortie (Pin_DataIn, Pin_Clock, Pin_Latch) pour piloter l‚Äôafficheur √† LED 7-segments. L‚Äôafficheur √† LED 7-segments utilis√©, achet√© chez RobotDyn (101x19¬†mm), utilise deux registres √† d√©calage 74HC595 cha√ģn√©s pour piloter les 8 digits de l‚Äôafficheur.
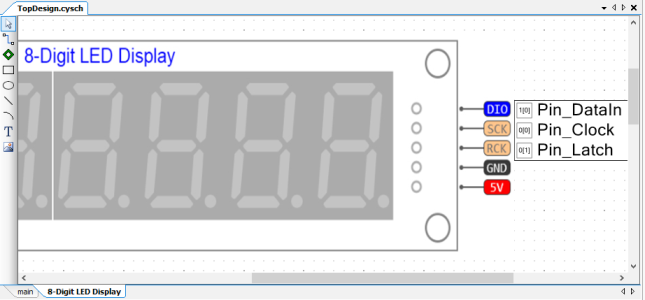
VIII-B. Plan de brochage▲
Ci-dessous, la fenêtre de l’EDI PSoC Creator montrant le plan de brochage utilisé :
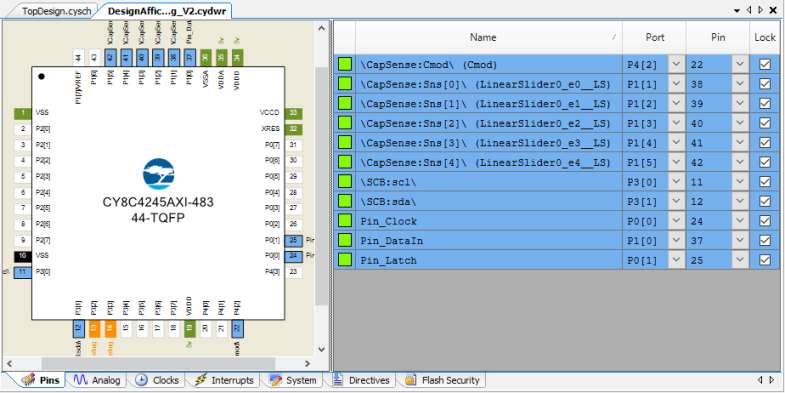
Mis à part les trois broches P0[0], P1[0] et P0[1] choisies et configurées pour piloter l’afficheur, les cinq autres broches configurées pour le capteur CapSense et le bloc de communication EzI2C correspondent aux connexions imposées par le matériel. Le bloc EzI2C n’est pas utilisé si le tuning du capteur CapSense est désactivé.
VIII-C. Gestion de l‚Äôafficheur▲
Le syst√®me d‚Äôaffichage n‚Äôest pas √† proprement parler l‚Äôobjectif de ce tutoriel. M√™me si l‚Äôafficheur 7-segments employ√© ici est tr√®s efficace par sa taille et sa luminosit√©, et pour un co√Ľt tr√®s modique, on aurait pu tout aussi bien utiliser un afficheur LCD, voire rendre compte des valeurs dans un terminal s√©rie.
À toutes fins utiles, on donne le code de pilotage de l’afficheur à LED. Le lecteur se reportera à la documentation de la société RobotDyn pour plus de détails sur les caractéristiques de cet afficheur.
La fonction led_display_7seg_Write() proposée permet ainsi l’affichage d’un entier 16 bits non signé entre 0 et 65535. Attention, le fonctionnement de l’afficheur est multiplexé. Chaque digit est affiché tour à tour, il faut donc compter sur la persistance rétinienne et relancer régulièrement la fonction led_display_7seg_Write().
VIII-D. Programme principal▲
Le cŇďur du syst√®me est programm√© comme une machine √† √©tats finis (finite state machine).
La glissière peut se trouver dans quatre états :
- STANDBY : aucune touche détectée, et en attente (état initial) ;
- TAP : touche détectée ;
- DRAG : mouvement axial sur la glissière détecté ;
- RELEASE¬†: touche rel√Ęch√©e.
Les transitions entre √©tats successifs sont programm√©es en comparant la position courante du centro√Įde (valeur NO_FINGER si aucune touche d√©tect√©e, position du centro√Įde sinon entre 0 et 255) avec la position 20¬†ms plus t√īt.
On donne le programme main.c complet :
#include "project.h"
#include "led_display_7seg.h"
/* Dé-commenter la ligne suivante pour activer le tuner */
//#define ENABLE_TUNER
#define NO_FINGER 0xFFFFu
enum state_capsense_t { STANDBY = 0,
TAP,
DRAG,
RELEASE };
enum state_capsense_t state = STANDBY;
volatile uint16 sliderval = NO_FINGER;
volatile uint16 oldsliderval = NO_FINGER;
volatile uint8 flag = 0;
uint16 counter = 0;
/* Code d'interruption */
CY_ISR(myInterrupt) {
if (! CapSense_IsBusy()){ /* Si acquisition CapSense terminée */
flag = 1; /* On prévient le programme principal pour autres traitements */
oldsliderval = sliderval; /* Sauvegarde de la position pr√©c√©dente du centro√Įde */
sliderval = CapSense_GetCentroidPos(CapSense_LINEARSLIDER0__LS); /* Nouvelle position du centroide */
}
}
int main(void)
{
CyGlobalIntEnable; /* autoriser les interruptions */
/* Initialisation, démarrage */
Timer_Start();
isr_timer_StartEx(myInterrupt); /* myInterrupt, adresse de la routine d’interruption */
#ifdef ENABLE_TUNER
CapSense_TunerStart();
#else
/* Démarrage, initialisation des baselines, et lancement du scan*/
CapSense_Start();
CapSense_InitializeAllBaselines();
CapSense_ScanEnabledWidgets();
#endif
for(;;)
{
led_display_7seg_Write(counter); /* Affichage du compteur */
if (flag) {
flag = 0;
#ifdef ENABLE_TUNER
CapSense_TunerComm();
#else
/* mise à jour des baselines et relance du scan */
CapSense_UpdateEnabledBaselines();
CapSense_ScanEnabledWidgets();
#endif
uint16 oldpos = oldsliderval;
uint16 newpos = sliderval;
switch(state) {
case STANDBY:
if (newpos != NO_FINGER && oldpos == NO_FINGER){
state = TAP;
}
break;
case TAP:
state = DRAG;
break;
case DRAG:
if (newpos != NO_FINGER) {
counter += newpos - oldpos;
}
else if (newpos == NO_FINGER && oldpos != NO_FINGER){
state = RELEASE;
}
break;
case RELEASE:
state = STANDBY;
break;
default:
break;
}
}
}
}On peut activer le tuning du capteur CapSense en dé-commentant la ligne avec #define ENABLE_TUNER.
Bien entendu, l’implantation proposée ici n’est qu’une ébauche simpliste. Elle ne fait qu’incrémenter ou décrémenter la variable counter en fonction du déplacement du doigt sur la glissière, comme le montre la vidéo de démonstration ci-dessous, et rien de plus. Libre à vous de l’adapter pour faire monter ou descendre vos stores déroulants…
Démonstration CapSense PSoC 4
Dans cette autre d√©monstration ci-dessous, on se sert de la valeur du compteur pour contr√īler la largeur d‚Äôimpulsion d‚Äôun signal PWM qui va commander en rotation un servomoteur de mod√©lisme¬†:
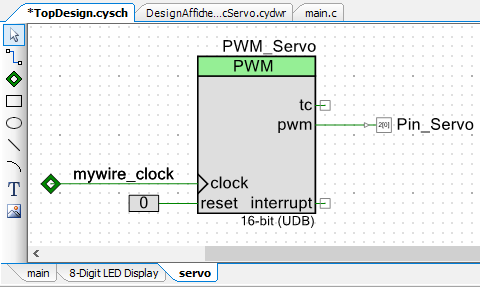
Commande de servomoteur avec une glissière sensitive CapSense
IX. Conclusion▲
Autour de sa technologie, Cypress propose des kits et des outils de d√©veloppement. Ce tutoriel vous a montr√© comment mettre en Ňďuvre rapidement un widget sensitif de type ¬ę¬†glissi√®re¬†¬Ľ (slider) sur une carte PSoC¬†4 dans l‚ÄôEDI PSoC Creator. Le proc√©d√© SmartSense d‚Äôauto-tuning facilite le d√©veloppement et la mise au point en ajustant automatiquement les param√®tres du capteur et du firmware afin d‚Äôoptimiser le rapport signal-bruit en toutes circonstances et √©viter ainsi la d√©tection de ¬ę¬†fausses touches¬†¬Ľ.
La solution CapSense de détection capacitive trouve des utilisations dans une grande variété d’applications et de produits : électroménager, domotique, automobile, Internet des Objets, industrie, etc. Les boutons mécaniques classiques sont alors remplacés par des interfaces utilisateurs ergonomiques et changent la façon d’interagir avec les objets électroniques.
Enfin, si Arduino reste votre plateforme favorite, le module Grove - Capacitive Touch Slide Sensor offre une solution intéressante avec sa glissière axiale et ses deux boutons sensitifs.

Au dos de ce module sur la photo, une puce CY8C4014LQI, un processeur PSoC 4 de Cypress…
Pour finir, je remercie Vincent PETIT et ClaudeLELOUP pour leur travail de relecture.