



I. Introduction▲
Les FPGAField-Programmable Gate Array sont des puces û circuits intûˋgrûˋs constituûˋs de rûˋseaux de blocs logiques. Les cellules logiques disposûˋes dans une matrice sont librement connectables et les circuits de la puce peuvent donc ûˆtre reconfigurûˋs mûˆme aprû´s sa fabrication.
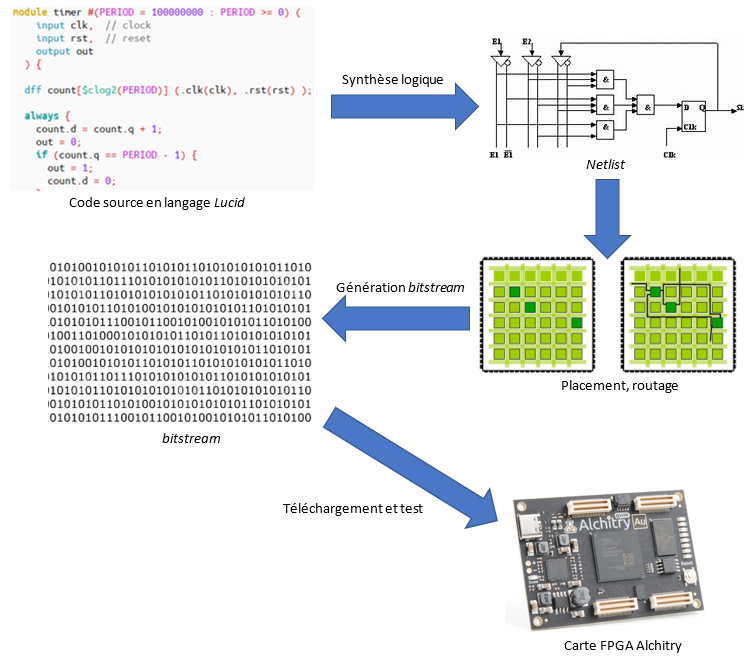
Pour reconfigurer la puce, on passe habituellement par un langage de description de matûˋriel (ou HDL pour Hardware Description Language) comme VHDL ou Verilog. Mûˆme si par abus de langage, on parle de ô¨ô programmationô ô£ de FPGA (aprû´s tout, lãactivitûˋ consiste toujours û ûˋcrire des lignes de code qui finiront en fichier binaire transfûˋrûˋ dans la puce), il ne sãagit pas de programmer un traitement selon un algorithme comme on a lãhabitude de le faire en Python, C/C++, Java, etc. Les lignes de code servent ici û dûˋcrire la structure et le comportement de votre circuit. Les outils fournis avec ces langages permettent de faire de la simulation et la synthû´se logique jusquãû lãimplûˋmentation physique optimale du circuit au céur de la puce FPGA.
II. Prûˋsentation de la plateforme Alchitry▲
La plateforme Alchitry propose û ce jourô :
- deux cartes de dûˋveloppement FPGAô : Alchitry Au et Alchitry Cuô ;
- des cartes dãextensions (shields faûÏon Arduino) pour lãexpûˋrimentation et le prototypageô ;
- un environnement de dûˋveloppement intûˋgrûˋ (EDI)ô : Alchitry Labs.
La carte Alchitry Au utilisûˋe dans ce tutoriel est la plus performante des deuxô : puce FPGA Xilinx Artixô 7 (33ô 280 cellules logiques, 256ô Mo RAM DDR3, 102 entrûˋes-sorties (3,3ô V), horloge 100ô MHz).
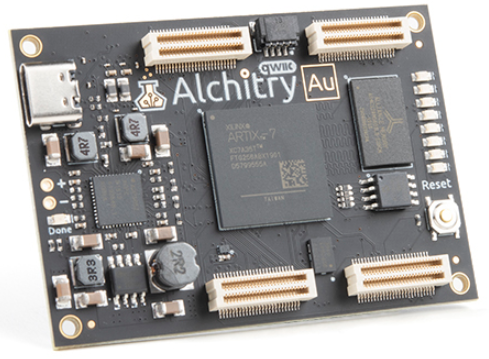
La carte intû´gre en surface un jeu de 8 LED vertes, un bouton utilisateur (pour un Reset en gûˋnûˋral), 4 connecteurs femelles 50 broches pour les cartes dãextension, un connecteur Qwiic (format proposûˋ par Sparkfun) pour des pûˋriphûˋriques I2C. La connexion au PC de dûˋveloppement se fera via un cûÂble USB typeô C vers USB typeô A.
û noter quãAlchitry a maintenant un partenariat avec Sparkfun pour la fabrication et la revente du matûˋriel de la plateforme, ce qui lui garantit une plus grande diffusion.
Quelque part, le modû´le que semble suivre Alchitry est celui de la plateforme Arduinoô : un environnement matûˋriel pour accûˋder plus facilement au monde des FPGA, un EDI minimal et un langage de description de matûˋriel, nommûˋ Lucid, surcouche du langage Verilog.
III. Langage Lucid▲
Les programmes de dûˋmonstration utilisûˋs par la suite dans ce tutoriel seront donc ûˋcrits en langage Lucid. Lucid est un langage de description de matûˋriel (Hardware Description Language ou HDL) prûˋvu spûˋcifiquement pour les FPGA, et conûÏu dãaprû´s leurs auteurs pour ûˋliminer la plupart des chausse-trapes que lãon retrouve dans les autres HDL comme Verilog et VHDL.
Dãaprû´s Alchitryô :
ô¨ô [ãÎ] Lucid met lãaccent sur la rûˋduction de la quantitûˋ de code que vous devez ûˋcrire tout en rendant vos projets davantage comprûˋhensibles.
Lucid est trû´s similaire au langage Verilog, tout en partageant une syntaxe commune avec C/C+ã+ (terminûˋ les begin/end).
Nous voulions que votre expûˋrience avec les FPGA se concentre sur lãapprentissage des FPGA plutûÇt que sur lãapprentissage dãune langue compliquûˋe. Lucid est assez semblable û Verilog, et les concepts sont les mûˆmes que VHDL (ou nãimporte quel autre HDL), de sorte que vous nãayez pas lãimpression de rester enfermûˋ en ûˋcrivant du code sous Lucid. Cependant, aprû´s avoir codûˋ en Lucid ces derniers mois, je ne veux plus travailler avec quoi que ce soit dãautre.ô ô£
Si vous hûˋsitez û franchir le pas avec des langages rûˋputûˋs comme Verilog ou VHDL, Lucid est prûˋconisûˋ dans un premier temps. Le but est de se familiariser avec les fondamentaux de la conception hardware, et revenir plus tard vers des HDL plus pointus quand vous aurez fait vos premiû´res armes.
û ma connaissance, ce langage nãa pas la popularitûˋ dãun langage comme le ô¨ô langage Arduinoô ô£ pour les microcontrûÇleurs de la plateforme du mûˆme nom, et vous avez peu de chances de le rencontrer en dehors de la plateforme Alchitry. La plateforme est jeune, les choses ûˋvolueront peut-ûˆtre, mais les FPGA peinent encore û sûˋduire le milieu des hobbyistes et des makers. Pour autant, avec cet environnement sous Lucid, vous avez enfin un bon moyen de vous y mettreãÎ
Et si vous souhaitez plus tard ûˋvoluer vers un HDL comme Verilog sur la plateforme Alchitry, la transition est toujours possible sans douleur.
IV. Installation des outils▲
Lãinstallation des outils est dûˋcrite û la rubrique Getting Started Tutorials du site, par exemple pour la carte Alchitry Auô : Getting Started With the Au
Pour ma part, lãinstallation sous Windowsô 10 des outils Xilinx (Vivado) et de lãEDI Alchitry Labs sãest dûˋroulûˋe sans problû´me. Il faut quand mûˆme ûˆtre patient, il y a 10ô Go de donnûˋes û tûˋlûˋcharger sur le site de Xilinx (oû¿ il faudra crûˋer un compte). Et une fois la carte connectûˋe au PC, elle fut reconnue tout de suite avec un nouveau port COM visible dans le Gestionnaire de pûˋriphûˋriques de Windows.
V. Premiers pas▲
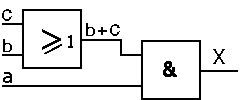
On commencera par un petit exercice de logique combinatoire. Supposons que votre systû´me embarquûˋ doive gûˋnûˋrer en sortie un signal x obûˋissant û une ûˋquation logique, soit le produitô : xô =ô aô .ô (bô +ô c), oû¿ a, b et c sont des entrûˋes du systû´me. Afin de valider le principe et vûˋrifier la table de vûˋritûˋ du systû´me, les trois entrûˋes tout-ou-rien simulûˋes prendront les 23=8 ûˋtats possibles.
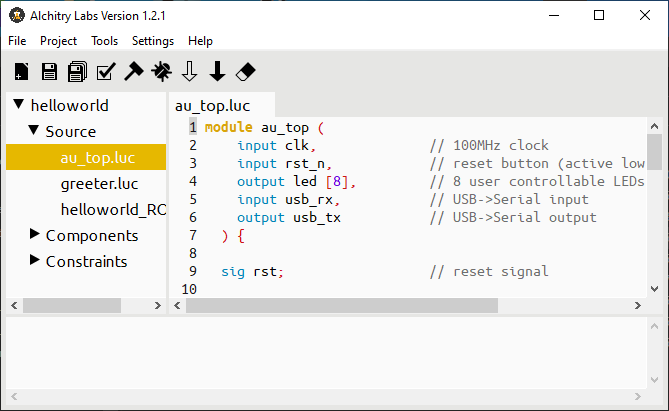
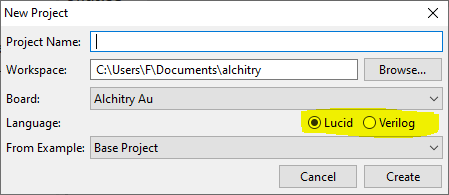
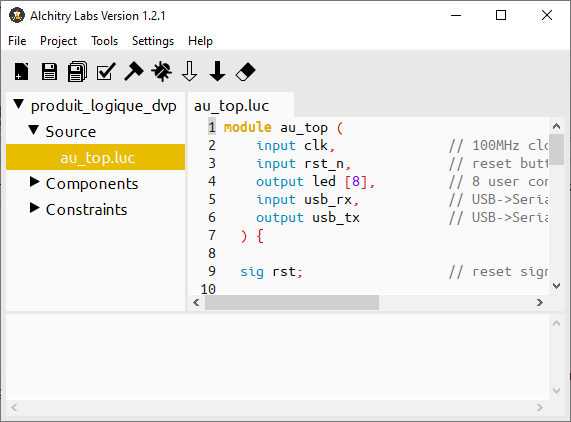
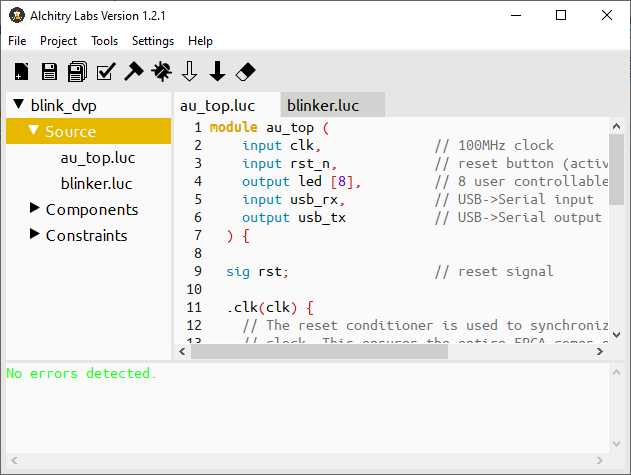
Par dûˋfaut, quand vous dûˋmarrez un nouveau projet dans lãEDI Alchitry Labs, le fichier source au_top.luc du module principal au_top vous est prûˋsentûˋô :
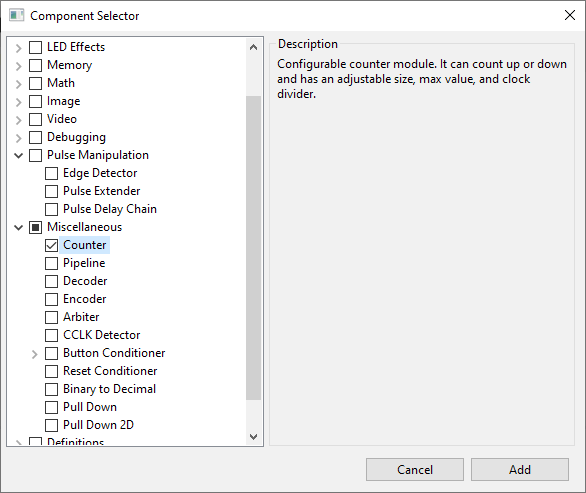
On commence par ajouter un composant de bibliothû´que (menu Projectã Add Components) en cochant Counterô :
La description des lignes de code dûˋjû prûˋsentes vous sera dûˋtaillûˋe plus tard, mais vous pouvez dûˋjû complûˋter le code du module principal de la faûÏon suivanteô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
28.
29.
30.
31.
32.
33.
34.
35.
36.
37.
38.
module au_top (
input clk, // 100MHz clock
input rst_n, // reset button (active low)
output led [8], // 8 user controllable LEDs
input usb_rx, // USB->Serial input
output usb_tx // USB->Serial output
) {
sig rst; // reset signal
.clk(clk) {
// The reset conditioner is used to synchronize the reset signal to the FPGA
// clock. This ensures the entire FPGA comes out of reset at the same time.
reset_conditioner reset_cond;
.rst(rst) {
counter myCounter(#SIZE(3)); // myCounter : 3 bits counter, freq = 100MHz
}
}
product myProduct;
sig x;
always {
reset_cond.in = ~rst_n; // input raw inverted reset signal
rst = reset_cond.out; // conditioned reset
myProduct.a = myCounter.value[0];
myProduct.b = myCounter.value[1];
myProduct.c = myCounter.value[2];
x = myProduct.out; // x = a AND (b OR C)
led = 8h00; // turn LEDs off
usb_tx = usb_rx; // echo the serial data
}
}
- Lignes 16 û 18ô : instanciation dãun compteur 3 bits nommûˋ myCounter. Ce compteur servira û faire prendre aux trois entrûˋes a, b et c les 23=8 combinaisons de 0 et de 1.
- Ligne 21ô : dûˋclaration dãune instance myProduct du module product. Ce module effectue le produit logique, voir le code plus loin.
- Ligne 23ô : dûˋclaration du signal x.
- Lignes 29 û 31ô : connexion des entrûˋes a, b, et c û la sortie de largeur 3 bits du compteur.
- Ligne 33ô : connexion du signal x au rûˋsultat du produit logique.
Pour le calcul du produit, il faut ajouter un nouveau fichier source au projet, nommûˋ product.luc (menu Fileã New FileãÎ)ô :
module product (
input a,
input b,
input c,
output out
) {
always {
out = a & (b | c); // a AND (b OR C)
}
}Quand le code est prûˆt, il reste û gûˋnûˋrer le projet et û le transfûˋrer grûÂce aux outils de lãEDIô :

![]() (Check syntax)ô : vûˋrification de la syntaxe du code.
(Check syntax)ô : vûˋrification de la syntaxe du code.
![]() (Build project)ô : gûˋnûˋration du projet.
(Build project)ô : gûˋnûˋration du projet.
![]() (Debug project)ô : gûˋnûˋration du projet en mode Debug afin de visualiser des signaux.
(Debug project)ô : gûˋnûˋration du projet en mode Debug afin de visualiser des signaux.
![]() (program temporary/flash)ô : transfert en mûˋmoire RAM de faûÏon temporaire ou en mûˋmoire Flash.
(program temporary/flash)ô : transfert en mûˋmoire RAM de faûÏon temporaire ou en mûˋmoire Flash.
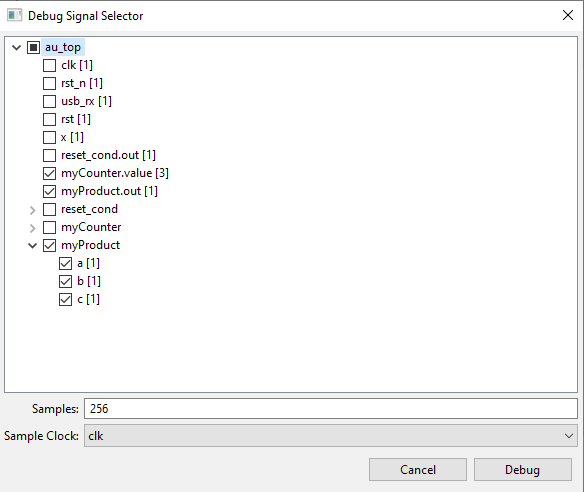
Pour visualiser les chronogrammes des signaux, gûˋnûˋrez le projet en mode Debug ![]() puis sûˋlectionnez les signaux myProduct, myProduct.out et myCounter.valueô :
puis sûˋlectionnez les signaux myProduct, myProduct.out et myCounter.valueô :
Attention, la gûˋnûˋration du projet peut prendre plusieurs minutes, comme cãest souvent le cas avec les FPGAô !
Aprû´s avoir transfûˋrûˋ le binaire gûˋnûˋrûˋ dans la carte, vous pouvez lancer une capture des signaux en passant par le menu Toolsã Wave captureô :
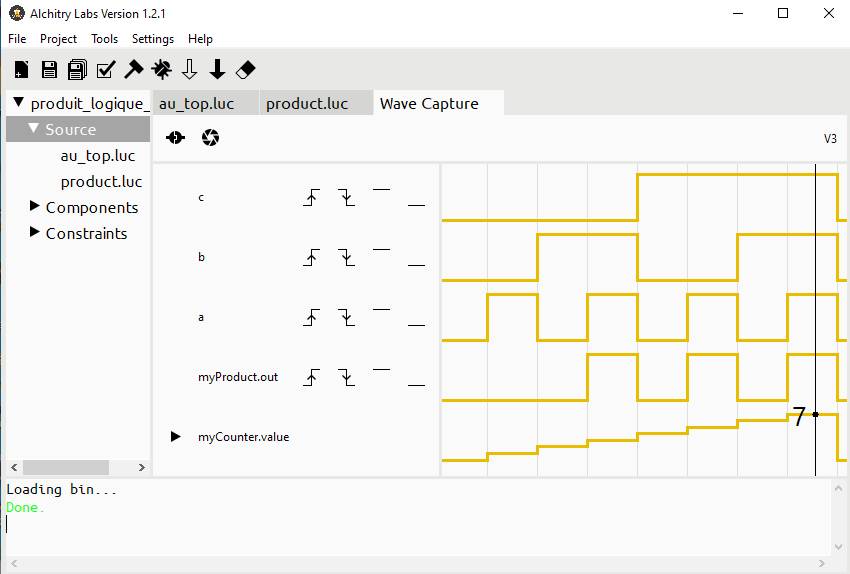
Les rûˋsultats du produit logique de la sortie myProduct.out sont ûˋvidemment conformes. û vous de vûˋrifierãÎ
Afin dãavoir un aperûÏu de ce qui se passe û la gûˋnûˋration du projet, ouvrez la suite Vivado de Xilinx. Dans Vivado, ouvrez le fichier du projet avec lãextension .xpr dans le sous-dossier work/vivado. Une fois le projet ouvert, depuis le Flow Navigator û gauche, dûˋveloppez la rubrique RTL Analysis et sûˋlectionnez schematic.
Vous devriez voir le schûˋma logique qui a servi de base pour la synthû´se du projetô :

Vous reconnaissez notamment le compteur 3 bits myCounter produisant les entrûˋes du bloc myProduct avec ses portes OR et AND pour faire le produit logique.
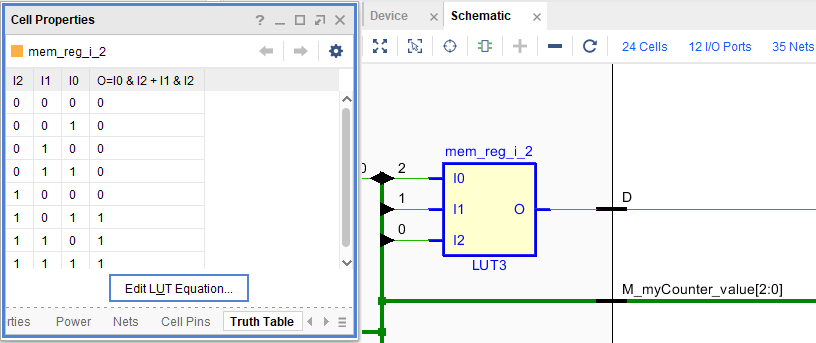
En pratique, les portes logiques ne sont pas rûˋellement implantûˋes. En fait, il sãagit de blocs logiques programmables comme les LUT (LookUp Table). Lãimage ci-dessous montre la LUT synthûˋtisûˋe pour faire le produit logique (depuis la rubrique Synthesis dans Vivado) et sa table de vûˋritûˋô :
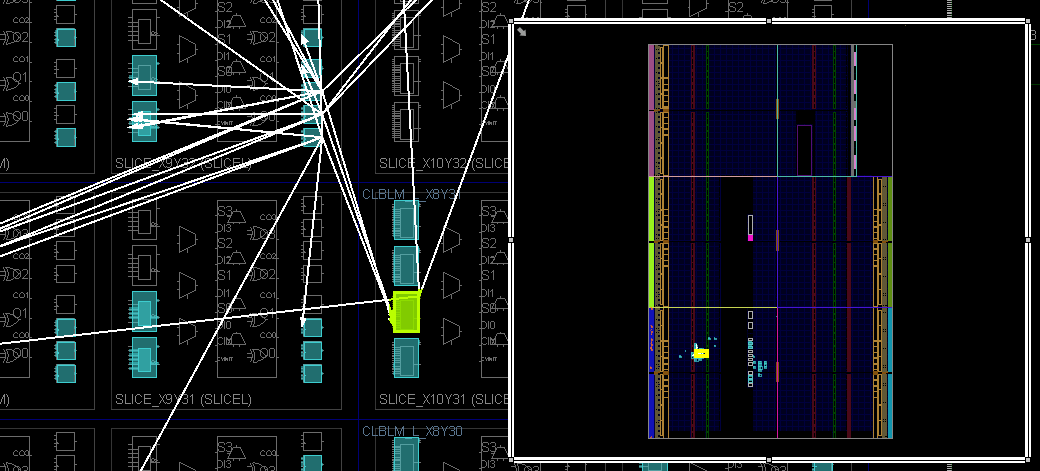
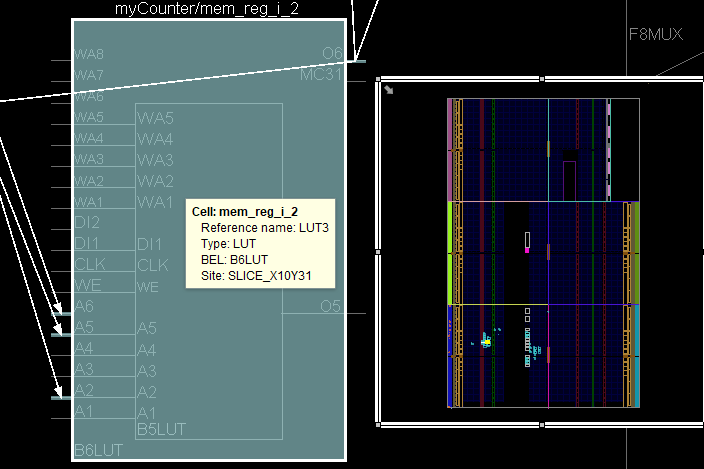
Enfin, les images suivantes montrent une partie du schûˋma dãimplûˋmentation physique au sein de la puce Xilinx (rubrique Implementation dans Vivado) et les connexions. La cellule en surbrillance indique la localisation de notre LUTô :
û prûˋsent, regardons en dûˋtail le code du module principal, en particulier ce qui a ûˋtûˋ passûˋ sous silenceãÎ
VI. Constitution du module principal▲
Typiquement, derriû´re les langages de description de matûˋriel (HDL), il y a toujours le concept de module. Un module est un bloc de circuit avec un certain nombre dãentrûˋes et de sorties, et contenant la logique comportementale qui lie ces entrûˋes-sorties. Bien quãil soit possible de mettre la totalitûˋ dãun projet dans un seul module, il est prûˋfûˋrable de le dûˋcouper en plusieurs modules afin de rûˋduire sa complexitûˋ. Certains de ces modules effectueront des tûÂches courantes et seront rûˋutilisables dans dãautres projets.
Tout nouveau projet en Lucid comprend un module principal ô¨ô topô ô£. Et pour tout projet Alchitry, ces modules sont soit dans le fichier cu_top.luc soit au_top.luc en fonction de la carte que vous utilisez (Alchitry Cu ou Alchitry Au).
Voici par exemple le fichier au_top.luc gûˋnûˋrûˋ automatiquement û la crûˋation dãun nouveau projetô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
module au_top (
input clk, // 100MHz clock
input rst_n, // reset button (active low)
output led [8], // 8 user controllable LEDs
input usb_rx, // USB->Serial input
output usb_tx // USB->Serial output
) {
sig rst; // reset signal
.clk(clk) {
// The reset conditioner is used to synchronize the reset signal to the FPGA
// clock. This ensures the entire FPGA comes out of reset at the same time.
reset_conditioner reset_cond;
}
always {
reset_cond.in = ~rst_n; // input raw inverted reset signal
rst = reset_cond.out; // conditioned reset
led = 8h00; // turn LEDs off
usb_tx = usb_rx; // echo the serial data
}
}
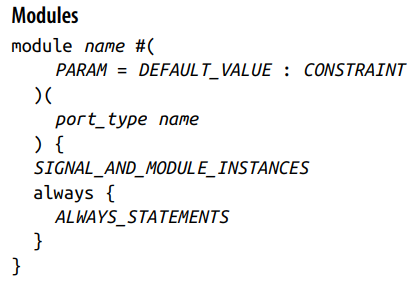
VI-A. Dûˋclaration des ports▲
Le code du module dûˋbute avec la dûˋclaration des ports. Cãest lãendroit oû¿ vous dûˋclarez les entrûˋes-sorties de votre module.
2.
3.
4.
5.
6.
7.
module au_top (
input clk, // 100MHz clock
input rst_n, // reset button (active low)
output led [8], // 8 user controllable LEDs
input usb_rx, // USB->Serial input
output usb_tx // USB->Serial output
)
Dans ce cas, comme il sãagit du module principal, ces dûˋclarations rûˋfûˋrencent les signaux disponibles sur les pûˋriphûˋriques de la carte elle-mûˆmeô : horloge 100ô MHz, bouton reset, jeu de 8 LED programmables, et port USB. Les localisations des broches de la puce vers lesquelles sont dirigûˋes les entrûˋes-sorties du module principal sont dûˋfinies dans le fichier alchitry.acf (Alchitry Constraint File) û la rubrique Constraints de lãexplorateur.
VI-B. Bloc dãinstanciation de signaux et modules▲
Le code û partir de la ligne 11 montre le contenu dãun bloc dãinstanciationô :
12.
13.
14.
15.
.clk(clk) {
// The reset conditioner is used to synchronize the reset signal to the FPGA
// clock. This ensures the entire FPGA comes out of reset at the same time.
reset_conditioner reset_cond;
}
Ce genre de blocs sãûˋcrit sous la formeô :
.port_name(EXPR), #PARAM_NAME(CONST_EXPR) {
SIGNAL_AND_MODULE_INSTANCES
}û lãintûˋrieur du bloc, vous trouvez ligne 14 une dûˋclaration dãinstance de module.
Pour toute instanciation, vous utilisez tout simplement le nom de la ressource suivi par le nom de cette instance particuliû´re. Ainsi, la ligne reset_conditioner reset_cond; crûˋe une instance du module reset_conditioner nommûˋe reset_cond.
Le bloc dûˋbute avec une syntaxe du type .port(signal) qui permet de dûˋclarer des connexions.
Dans notre cas, le module comporte un port clk, et ce port clk de lãinstance est donc connectûˋ au signal clk du module principal ô¨ô topô ô£.
Plus loin dans le code , lãentrûˋe de cette instance est reliûˋe au bouton reset de la carteô :
reset_cond.in = ~rst_n; // input raw inverted reset signal
VI-C. Bloc always▲
Le bloc always est lãendroit oû¿ vous dûˋcrivez toute la logique du comportement de votre module.
û lãintûˋrieur du bloc always, un ensemble de dûˋclarations structurelles ou comportementalesô : affectations de signaux, structures conditionnelles if ou case, boucles for, etc.
Comme son parent Verilog, Lucid est un langage concurrent (parallû´le), contrairement aux langages procûˋduraux (C, C++, JavaãÎ) qui sont sûˋquentiels par nature. Les diffûˋrents processus dãun module sãexûˋcutent donc en parallû´le, mais certains blocs dãinstructions peuvent aussi sãexûˋcuter de faûÏon sûˋquentielle. Cãest notamment le cas û lãintûˋrieur du bloc always (par dûˋfinition, dont les instructions sont rûˋitûˋrûˋes indûˋfiniment) qui autorise les constructions procûˋdurales.
Ici, le bloc ne comprend que des affectations de signaux. Il faut imaginer des cûÂbles de connexion tendus entre les signaux dont les expressions figurent de part et dãautre du signe = (avec la condition que lãon puisse ô¨ô ûˋcrireô ô£ sur le signal de lãexpression û gauche du signe =, et que le signal de lãexpression û sa droite puisse ûˆtre ô¨ô luô ô£).
18.
19.
20.
21.
22.
23.
24.
always {
reset_cond.in = ~rst_n; // input raw inverted reset signal
rst = reset_cond.out; // conditioned reset
led = 8h00; // turn LEDs off
usb_tx = usb_rx; // echo the serial data
}
Dans lãordreô :
- lãentrûˋe in de lãinstance reset_cond est connectûˋe au signal (inversûˋ avec ~) du bouton resetô ;
- le signal rst provient de la sortie out de lãinstance reset_condô ;
- les signaux dirigûˋs vers les 8 LED sont û lãûˋtat bas (8h00ô : signal de largeur 8 bits mis û zûˋro, h pour indiquer un format hexadûˋcimal)ô ;
- les signaux reûÏus sur Rx de la liaison sûˋrie sont renvoyûˋs vers Tx.
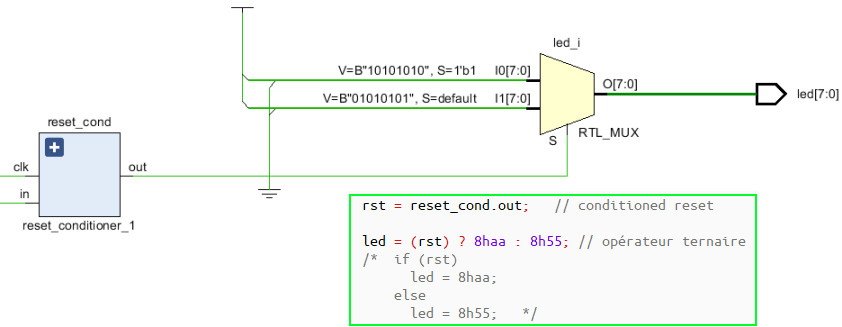
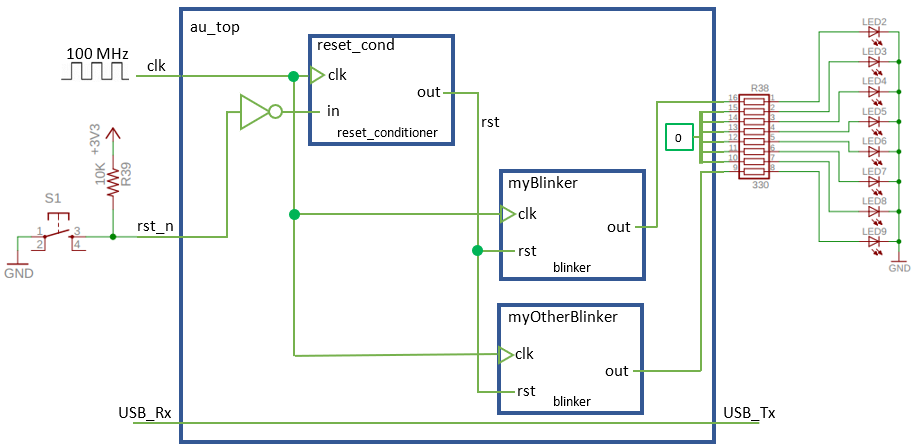
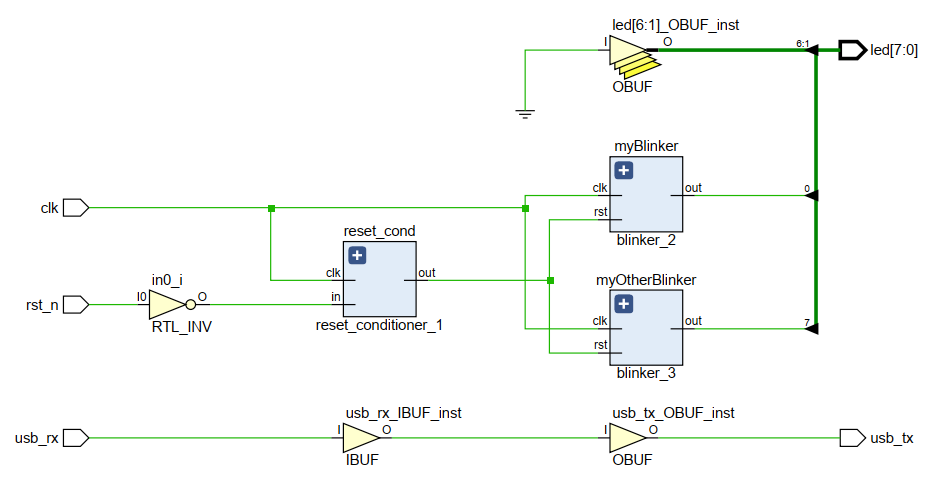
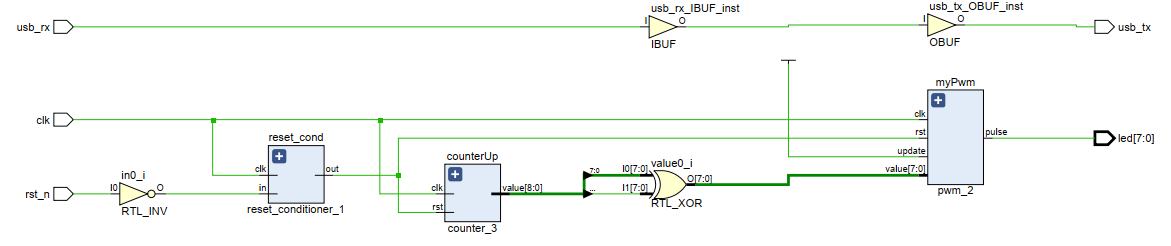
La configuration conûÏue avec le fichier au_top.luc par dûˋfaut peut ûˆtre rûˋsumûˋe par le schûˋma-blocs suivantô :
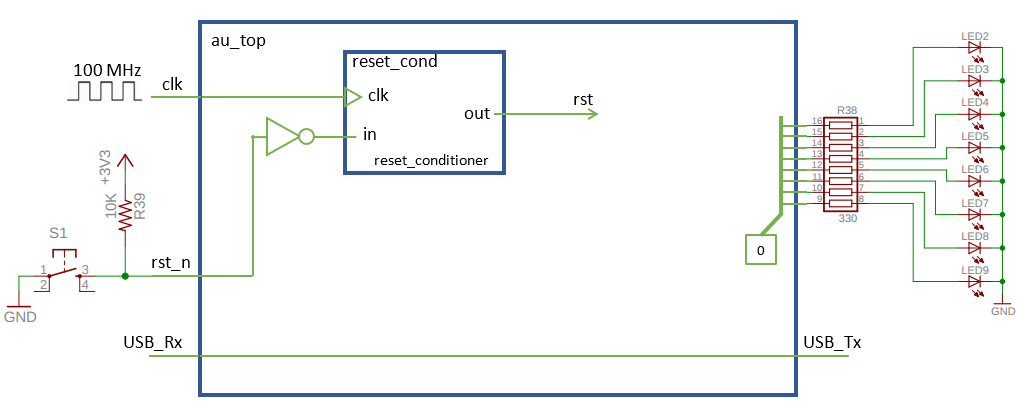
Rûˋalisûˋ sous Word![]() , ce schûˋma nãest en rien normalisûˋ, mais il est trû´s utile en phase de rûˋflexion pendant la mise au point du projet. Il est toutefois trû´s proche de celui obtenu aprû´s coup avec une analyse sous Vivadoô :
, ce schûˋma nãest en rien normalisûˋ, mais il est trû´s utile en phase de rûˋflexion pendant la mise au point du projet. Il est toutefois trû´s proche de celui obtenu aprû´s coup avec une analyse sous Vivadoô :
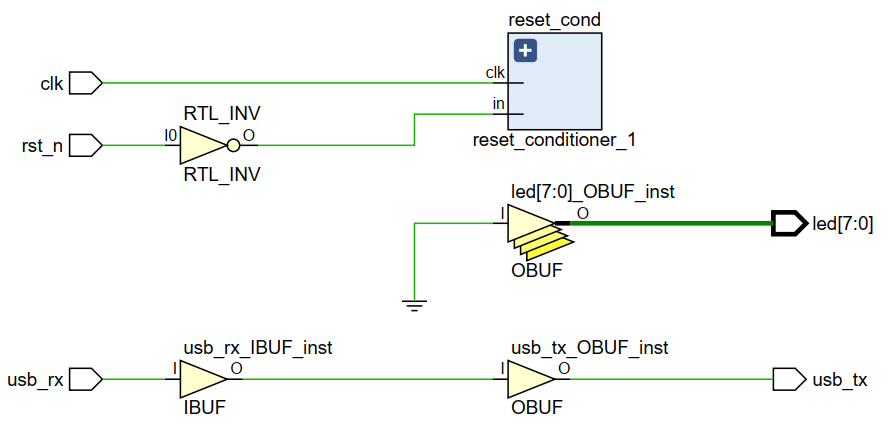
Finalement, toute cette partie met û disposition un circuit de conditionnement du signal sur appui du bouton reset, synchronisûˋ avec lãhorloge. Le signal rst en sortie est indispensable pour rûˋinitialiser proprement (et simultanûˋment) les composants de votre projet (reset local).
VII. Exemples de dûˋmonstration▲
VII-A. Clignotement de LED▲
Un blinker pour dûˋbuter, quelle surpriseô !
Le schûˋma-blocs du projet ci-dessous comprend deux instances dãun nouveau module blinkerô : myBlinker et myOtherBlinker. Chaque blinker a deux entrûˋes (signal dãhorloge clk et reset rst) et une sortie out. Sur la sortie out dãun blinker, le module gûˋnû´re un signal carrûˋ de pûˋriode donnûˋe. Il reste û connecter la sortie out dãun blinker û une LED pour la faire clignoter.
On repart du module principal au_top.luc dãun nouveau projet que lãon complû´te ainsiô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
28.
29.
30.
module au_top (
input clk, // 100MHz clock
input rst_n, // reset button (active low)
output led [8], // 8 user controllable LEDs
input usb_rx, // USB->Serial input
output usb_tx // USB->Serial output
) {
sig rst; // reset signal
.clk(clk) {
// The reset conditioner is used to synchronize the reset signal to the FPGA
// clock. This ensures the entire FPGA comes out of reset at the same time.
reset_conditioner reset_cond;
.rst(rst) {
blinker myBlinker(#DELAY(50000000)); // 50000000 = 0,5s
blinker myOtherBlinker(#DELAY(25000000)); // 25000000 = 0,25s
}
}
always {
reset_cond.in = ~rst_n; // input raw inverted reset signal
rst = reset_cond.out; // conditioned reset
led = c{myOtherBlinker.out, 6x{b0}, myBlinker.out};
usb_tx = usb_rx; // echo the serial data
}
}
Lignes 17 et 18ô : dûˋclaration de deux instances du module blinker nommûˋes myBlinker et myOtherBlinker. Sur la sortie out dãun blinker, le module gûˋnû´re un signal carrûˋ de pûˋriode donnûˋe. La pûˋriode est dûˋfinie grûÂce au paramû´tre DELAY. DELAY correspond au nombre de ticks de lãhorloge avant basculement de lãûˋtat du signal. Avec une horloge û 100ô MHz, soit 100ô millions de ticks par seconde, un DELAY fixûˋ û 50 millions gûˋnûˋrera un basculement on/off ou off/on toutes les 0,5ô s, et donc un signal carrûˋ de pûˋriode 1ô s.
Notez comment sont imbriquûˋes les connexions aux ports. Lãinstance reset_cond est connectûˋe û lãhorloge clk seule. Les deux instances de blinker sont reliûˋes û lãhorloge clk et au signal reset rst.
Ligne 26ô : les sorties des deux instances de blinker sont dirigûˋes vers les LED. La syntaxe c{ãÎ} permet la concatûˋnation de tableaux. Ici, on concatû´ne la sortie myOtherBlinker.out (largeur 1 bit) avec 6 bits û 0 puis avec la sortie myBlinker.out (largeur 1 bit). Lãensemble concatûˋnûˋ a une largeur 8 bits et est dirigûˋ vers le tableau led connectûˋ au jeu de 8 LED.
Il reste û coder le comportement du blinker dans un nouveau fichier source blinker.luc rajoutûˋ depuis lãEDIô :
Mais avant cela, il vous faudra ûˋtudier le comportement dãun composant essentiel de logique sûˋquentielleô : la bascule D.
VII-A-1. La bascule D▲
Une bascule D (ou D-type Flip Flop, soit DFF) est un circuit logique qui peut mûˋmoriser un ûˋtat.
Quand prûˋcûˋdemment on avait ûˋcritô :
reset_cond.in = ~rst_n;Vous devez garder û l'esprit que reset_cond.in nãest pas une variable mûˋmorisant une valeur. Vous venez seulement de connecter un point A û un point B pour transporter un signalãÎ cãest tout. Il nãy a pas de valeur stockûˋe dans une variable ici.
Pour autant, un systû´me sans mûˋmoire est plutûÇt limitûˋ, et cãest lû que la bascule D intervient.
Une bascule D peut ûˆtre schûˋmatisûˋe comme suitô :
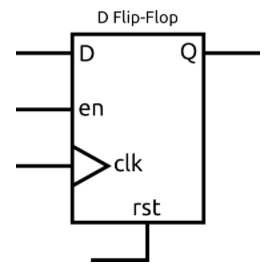
Elle a une entrûˋe dãhorloge clk de synchronisation (ici, sur front montant de lãhorloge).
Le but de ce circuit est de recopier la donnûˋe qui se prûˋsente û lãentrûˋe D (Data) sur sa sortie Q û chaque front montant de lãhorloge. Entre deux fronts montants de lãhorloge, lãûˋtat de la sortie Q est maintenu quels que soient les changements sur lãentrûˋe D. Dans cet intervalle de temps, il y a bien un ûˋtat ô¨ô mûˋmorisûˋô ô£.
Ce circuit, dit û logique sûˋquentielle, se distingue des circuits û logique combinatoire oû¿ la sortie ne dûˋpend que de lãûˋtat courant des entrûˋes.
En Lucid, il nãy a pas explicitement dãinterface avec lãentrûˋe en (enable), la bascule est active tant que la carte est alimentûˋe.
Lorsquãun signal û lãûˋtat haut arrive sur lãentrûˋe reset rst (typiquement avec le circuit de reset conditionnûˋ et synchronisûˋ vu plus haut pour rûˋinitialiser toutes les bascules du circuit simultanûˋment), la sortie Q est rûˋinitialisûˋe (par dûˋfaut û zûˋro).
Pour dûˋclarer une bascule D en Lucid, il suffit de lãinstancier en prûˋcisant le type dffô :
dff ma_bascule;Le fonctionnement de la bascule D peut-ûˆtre gûˋnûˋralisûˋ avec des signaux de largeur n bits.
dff octet[8];Dans ce cas, lãoctet qui arrive sur D sera recopiûˋ sur la sortie Q de largeur 8 bits û chaque front dãhorloge.
Comme toute instance, on accû´de aux entrûˋes-sorties avec la syntaxeô : ma_bascule.d, ma_bascule.q, et ma_bascule.rst.
On peut prûˋciser lãûˋtat ou la valeur initiale de la sortie Q û la mise en alimentation de la carte ou aprû´s un reset avec un paramû´tre. Par exempleô :
dff compteur[8] (#INIT(100)); // compteur 8 bits initialisûˋ û 100Tout est prûˆt pour comprendre le fonctionnement du blinker.
VII-A-2. Module blinker▲
On donne le code du blinker (dans un nouveau fichier blinker.luc rajoutûˋ au projet)ô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
module blinker #(DELAY = 50000000 : DELAY > 0) (
input clk, // clock
input rst, // reset
output out // blink signal
)
{
.clk(clk) {
.rst(rst) {
dff counter[$clog2(DELAY)];
dff blink;
}
}
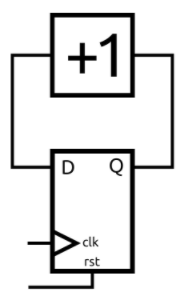
always {
counter.d = counter.q + 1;
if (counter.q == DELAY - 1) {
counter.d = 0;
blink.d = ~blink.q;
}
out = blink.q;
}
}
Lignes 10 et 11ô : instanciation de deux bascules D raccordûˋes aux signaux dãhorloge clk et de reset rstô : counter et blink.
La premiû´re bascule est un simple compteur qui sãincrûˋmentera û chaque front montant de lãhorloge. La largeur du compteur en nombre de bits dûˋpend de la valeur de DELAY, et est calculûˋe avec la fonction $clog2 (logarithme en base 2).
La deuxiû´me bascule blink produit le signal carrûˋ sur sa sortie.
Dans le bloc always, on met en éuvre lãincrûˋmentation du compteurô : counter.d = counter.q + 1;
Juste avant le dûˋbordement du compteur, on remet le compteur û zûˋro et on bascule lãûˋtat du signal en sortieô : blink.d = ~blink.q;.
Voici le schûˋma logique du projet obtenu sous Vivadoô :
Et maintenant, on admire le rûˋsultat aprû´s transfert du fichier binaireãÎ
La LED du bas clignote û la frûˋquence de 1ô Hz. Celle du haut clignote deux fois plus vite.
VII-B. Jouer avec la luminositûˋ des LED avec un signal PWM▲
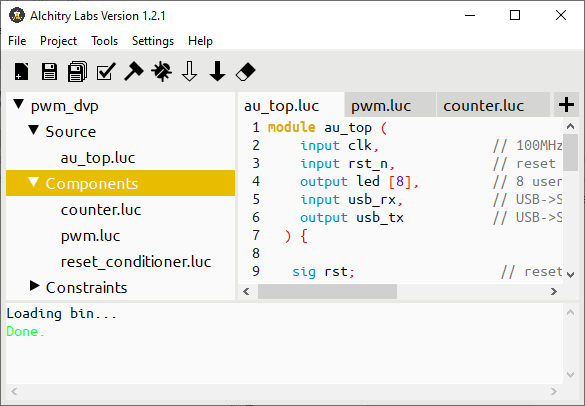
Pour ce deuxiû´me exemple, vous allez avoir besoin dãun gûˋnûˋrateur de signaux PWM. Vous pourriez le dûˋvelopper vous-mûˆme, mais autant vous affranchir de cette tûÂche en allant piocher un composant dûˋdiûˋ dans la bibliothû´que de composants proposûˋs depuis lãEDI. Pour cela, il faut aller dans le menu Projectã Add components et cocher Pulse Width Modulator (avec sa dûˋpendance Counter) dans le sûˋlecteur de composantsô :
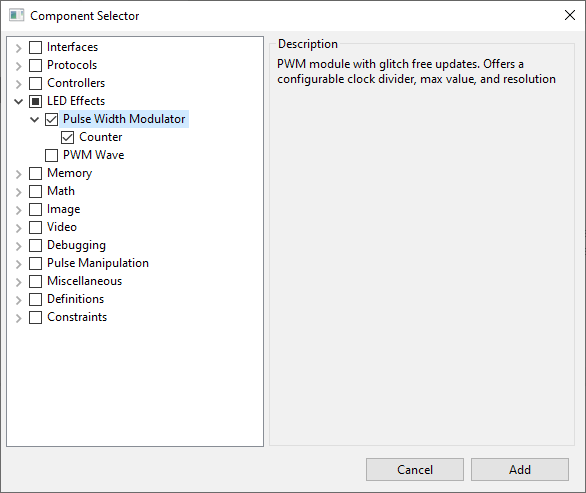
Les deux nouveaux fichiers pwm.luc et counter.luc correspondants apparaissent dans les sources û la rubrique Componentsô :
Lãanalyse de ces fichiers, notamment les commentaires au dûˋbut et la dûˋclaration des entrûˋes-sorties du module nous renseignent sur leur fonctionnement.
Ainsi, avec lãinstanciation suivante dans le module au_top.luc, vous dûˋclarez un gûˋnûˋrateur PWM nommûˋ myPwm de rûˋsolution 8 bits raccordûˋ û lãhorloge principale et au signal resetô :
clk(clk) {
// The reset conditioner is used to synchronize the reset signal to the FPGA
// clock. This ensures the entire FPGA comes out of reset at the same time.
reset_conditioner reset_cond;
.rst(rst) {
pwm myPwm(#WIDTH(8));
// ...
}Le but est de gûˋnûˋrer des vagues avec le jeu de LED qui sãallume progressivement, puis sãûˋteint progressivement et ainsi de suite, comme le montre la vidûˋo suivanteô :
Pour gûˋnûˋrer ces vagues successives, on va aussi avoir besoin dãun compteur nommûˋ ici counterUp.
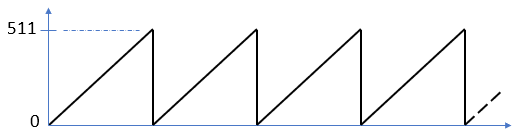
counter counterUp(#SIZE(9), #DIV(18), #UP(1));Le compteur instanciûˋ est un compteur 9 bits et la vitesse de comptage dûˋpend de lãhorloge 100ô MHz associûˋe û un diviseur de frûˋquence par 218. Ainsi, ce compteur va mettre (512ô xô 218)ô /ô 100ô 000ô 000ô = 1,34ô s pour ûˋvoluer de 0 û 511. Le code devientô :
clk(clk) {
// The reset conditioner is used to synchronize the reset signal to the FPGA
// clock. This ensures the entire FPGA comes out of reset at the same time.
reset_conditioner reset_cond;
.rst(rst) {
pwm myPwm(#WIDTH(8));
counter counterUp(#SIZE(9), #DIV(18), #UP(1));
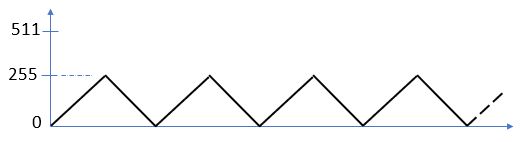
}Tel quel, le compteur ûˋvolue entre 0 et 511 en 1,34ô s, mais avec un retour û zûˋro sur dûˋbordement, ce qui donne un signal en dents de scie comme sur la figure ci-dessousô :
Si vous voulez gûˋnûˋrer une ô¨ô vagueô ô£ avec des transitions ô¨ô doucesô ô£, il faut se rapprocher du signal triangulaire suivantô :
Il se trouve que le passage du signal en dents de scie au signal triangulaire est assez aisûˋ û obtenir grûÂce û une astuce dûˋcrite dans un tutoriel sur le site de Sparkfunô : First FPGA Project - Getting Fancy with PWM.
Comme le compteur a une rûˋsolution de 9 bits, son bit de poids fort est û 1 quand le compteur dûˋpasse la valeur 255. Il faudrait quãû partir de lû le compteur se mette û compter û reboursô : 255, 254, 253, etc. Ce compte û rebours peut ûˆtre obtenu par simple inversion de bits. Si on devait par exemple compter de 0 û 7, cela donnerait en binaireô : 000, 001, 010, 011, ãÎ , 111. Inversez les bits un par un et vous obtiendrezô :111, 110, 101, ãÎ, 000, soit le compte û rebours vouluô : 7, 6, 5, ãÎ, 0.
On va donc rajouter cette ligne dans le bloc alwaysô :
myPwm.value = counterUp.value[7-:8] ^ 8x{counterUp.value[8]};- Le signe ^ est celui du OU exclusif (XOR). En effet, a xor 1 inverse le bit a.
- counterUp.value[
7-:8] met de cûÇtûˋ le bit 8 de poids fort. On rûˋcupû´re les 8 bits restants û partir du bit 7. - 8x
{counterUp.value[8]}forme un nombre 8 bits en concatûˋnant huit fois le bit de poids fort du compteur, soit 1111ô 1111 pour toute valeur du compteur û partir de 256, et 0000ô 0000 sinon.
Faites le calcul û la main avec quelques valeurs pour vûˋrifier que vous avez compris le principe, cãest imparable.
Il reste û diriger la sortie du signal PWM vers le jeu de 8 LED et on obtient le code finalô :
module au_top (
input clk, // 100MHz clock
input rst_n, // reset button (active low)
output led [8], // 8 user controllable LEDs
input usb_rx, // USB->Serial input
output usb_tx // USB->Serial output
) {
sig rst; // reset signal
.clk(clk) {
// The reset conditioner is used to synchronize the reset signal to the FPGA
// clock. This ensures the entire FPGA comes out of reset at the same time.
reset_conditioner reset_cond;
.rst(rst) {
pwm myPwm(#WIDTH(8));
counter counterUp(#SIZE(9), #DIV(18), #UP(1));
}
}
always {
reset_cond.in = ~rst_n; // input raw inverted reset signal
rst = reset_cond.out; // conditioned reset
myPwm.value = counterUp.value[7-:8] ^ 8x{counterUp.value[8]};
myPwm.update = 1; // always update
led = c{8x{myPwm.pulse}}; // pulse leds
usb_tx = usb_rx; // echo the serial data
}
}
Et si vous voulez une validation plus rigoureuse du fonctionnement, vous pouvez vous tourner û nouveau vers la suite Vivado de Xilinx et faire une simulation comportementale. La copie dãûˋcran ci-dessous du rûˋsultat de cette simulation montre les signaux du compteur 9 bits (tout en bas, en orange) et de la valeur 8 bits du PWM (juste au-dessus, en rouge) aux alentours de tô =ô 0,67ô s. Avant de lancer la simulation, il faut ô¨ô forcerô ô£ le signal dãhorloge û 100ô MHz et le signal reset rst û 0ô :
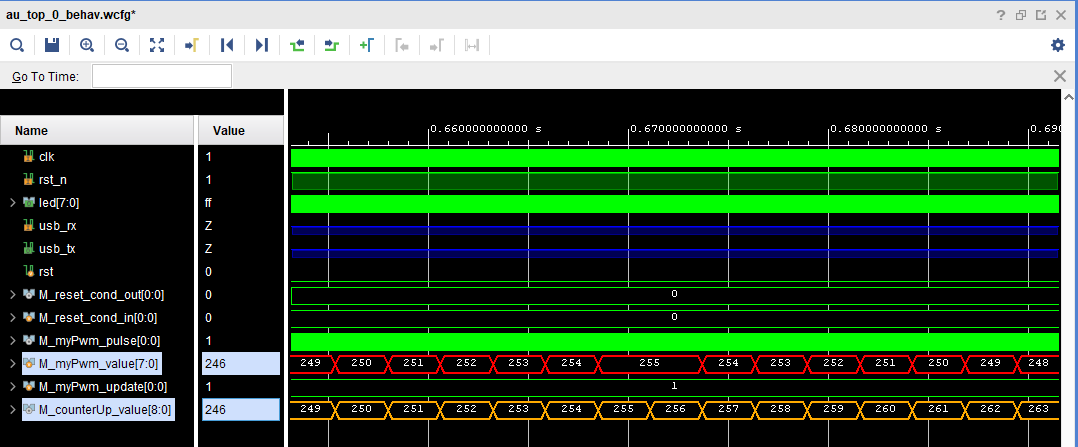
On voit quãau-delû de 255 pour le compteur, la valeur du PWM commence û dûˋcroûÛtre. û tô =ô 0,67ô s, les LED sont û la luminositûˋ maximale.
Aux alentours de tô =ô 1,34ô sô :
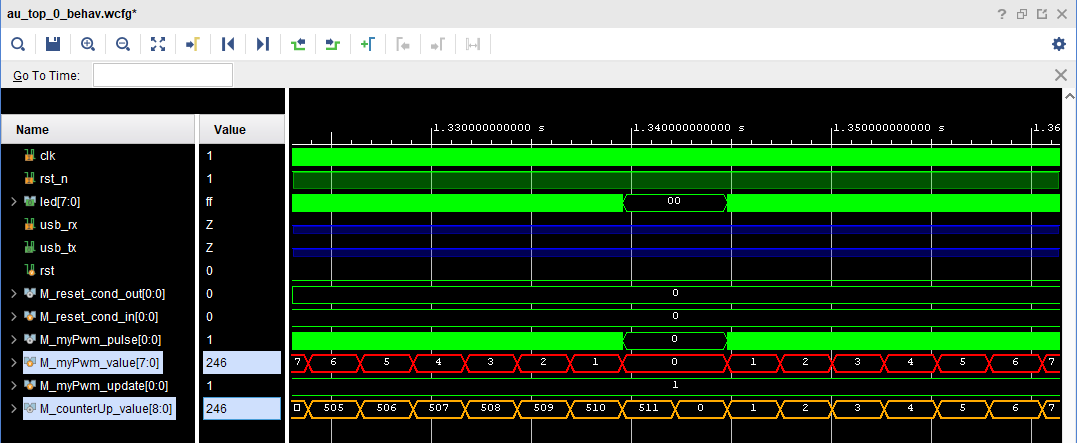
Lorsque le compteur 9 bits dûˋborde, la valeur du PWM revient û 0. û ce moment-lû , les LED sont ûˋteintes, la premiû´re ô¨ô vagueô ô£ est passûˋe comme prûˋvu û tô =ô 1,34ô s. La simulation montre bien une ûˋvolution conforme au signal triangulaire souhaitûˋ.
VII-C. Piloter une LED avec un bouton-poussoir▲
Dans cet exemple, lãunique bouton en surface de la carte est dûˋtournûˋ de sa fonction dãorigine (reset) pour piloter une LED. Ici, chaque appui sur le bouton doit basculer lãûˋtat de la LED. Un premier appui pour allumer la LED, un deuxiû´me appui pour lãûˋteindre, etc.
Pour cela, il faut dûˋtecter les fronts montants du signal. Aprû´s quelques tests, on se rend compte aussi quãun systû´me anti-rebonds sur le bouton (debouncer) est nûˋcessaire pour un bon fonctionnement.
Il y a plusieurs moyens dãatteindre lãobjectif, mais ici on fera appel aux composants de la bibliothû´que, soitô : Button Conditionner, et Edge Detector. Lû encore, voir les fichiers source de ces modules pour dûˋcouvrir les entrûˋes-sorties et les paramû´tres optionnels.
Le premier composant ûˋlimine les rebonds du boutonô :
{
.clk(clk) {
// ...
.in(btn) {
button_conditioner myButtonCond;
}
// ...
}Et la sortie du conditionneur est raccordûˋe û lãentrûˋe du dûˋtecteur de front montantô :
{
.clk(clk) {
// ...
.in(btn) {
button_conditioner myButtonCond;
}
.in(myButtonCond.out) {
edge_detector myEdgeDetector(#RISE(1), #FALL(0));
}
}Voici le code du module toggle_button.luc.
module toggle_button (
input clk, // clock
input btn, // button
output out
) {
.clk(clk) {
dff toggle;
.in(btn) {
button_conditioner myButtonCond;
}
.in(myButtonCond.out) {
edge_detector myEdgeDetector(#RISE(1), #FALL(0));
}
}
always {
out = toggle.q;
if (myEdgeDetector.out) {
toggle.d = ~toggle.q;
}
}
}Dans le bloc always, on organise la sortie out de faûÏon û basculer uniquement sur front montant du signal dãentrûˋe (le bouton).
Et voici le code du module principal au_top.luc, qui instancie un toggle_button. La sortie est dirigûˋe vers les LEDô :
module au_top (
input clk, // 100MHz clock
input rst_n, // reset button (active low)
output led [8], // 8 user controllable LEDs
input usb_rx, // USB->Serial input
output usb_tx // USB->Serial output
) {
.clk(clk) {
.btn(~rst_n) {
toggle_button myToggleButton;
}
}
always {
led = c{8x{myToggleButton.out}};
usb_tx = usb_rx; // echo the serial data
}
}
VII-D. Envoyer un message sur la liaison sûˋrie▲
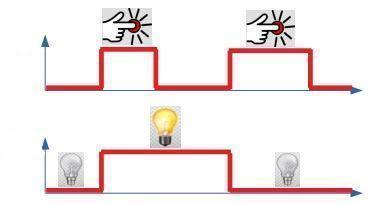
Dans ce dernier exemple, on propose de configurer la carte de sorte quãelle envoie en continu un simple Hello World! toutes les secondes sur la liaison sûˋrie. Lãanimation qui suit est le rûˋsultat obtenu dans le terminal sûˋrie intûˋgrûˋ û lãEDI Alchitry Labs (menu Toolsã Serial Port Monitor)ô :
Pour la communication sûˋrie, lãEDI intû´gre dûˋjû dans ses composants la plupart des protocoles courantsô : UART, SPI, I2C et SCCBô :
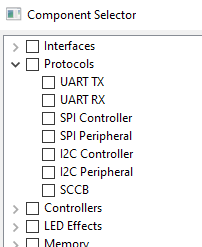
Pour transmettre un message sur la liaison sûˋrie, on cochera donc le composant UART TX.
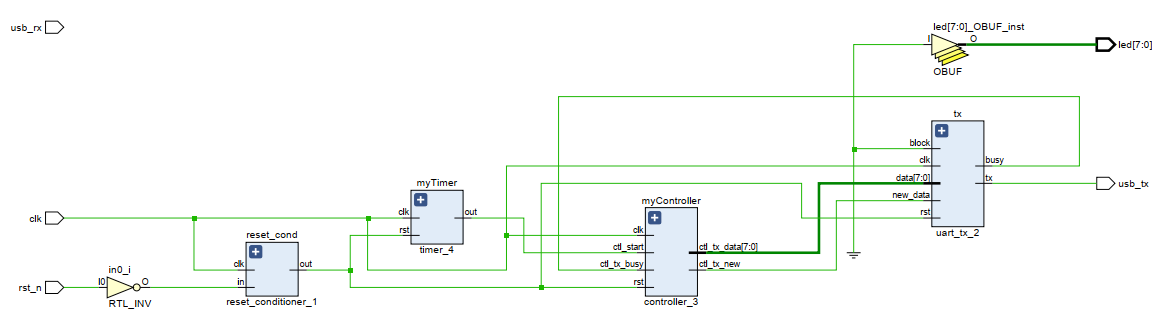
Dû´s lors, la configuration sãavû´re plus complexe que les exemples prûˋcûˋdents, et une description par schûˋma-blocs devient indispensableô :
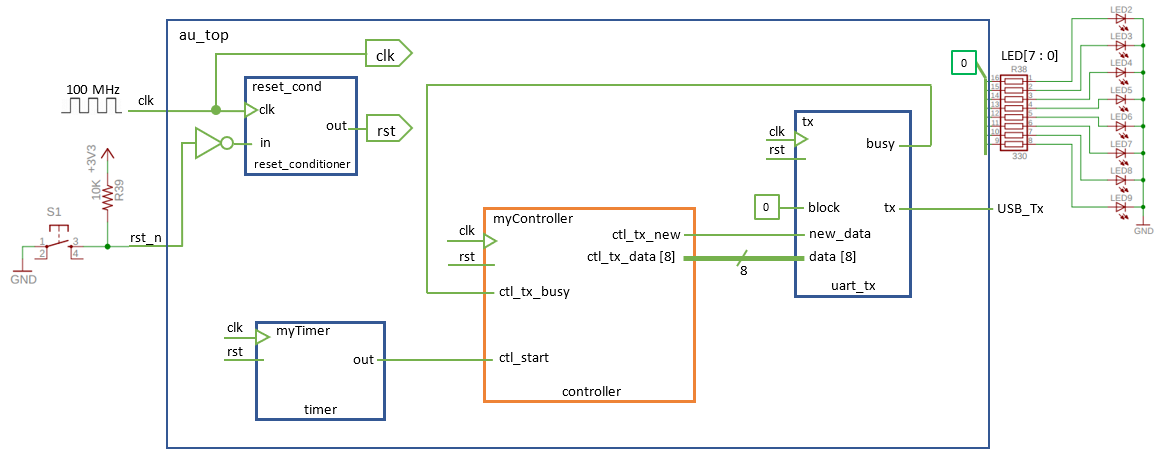
Module uart_txô : ce module reprûˋsentûˋ par le bloc en haut û droite est le composant rajoutûˋ au projet depuis le sûˋlecteur de lãEDI. Les signaux du message sûˋrie de la sortie tx sont dirigûˋs vers le port USB selon le protocole sûˋrie UART. Quand une transmission est en cours, le signal busy est û 1 pour indiquer que la liaison est occupûˋe. Comme leur nom lãindique, lãentrûˋe new_data sera mise û 1 pour signaler lãarrivûˋe dãune nouvelle donnûˋe, lãoctet de donnûˋe û transmettre arrivant sur lãentrûˋe data de largeur 8 bits.
Module timerô : ce module du bloc en bas û gauche envoie une impulsion toutes les secondes sur son unique sortie, afin de cadencer lãenvoi du message Hello World!.
Module controllerô : ce module est chargûˋ de prûˋparer le message textuel et dãenvoyer les codes ASCII des caractû´res un par un au module suivant uart_tx. Une description plus prûˋcise des blocs contenus dans ce module est proposûˋe ci-dessous.

On donne le code du sous-module message.lucô :
module message (
input index[4],
output letter[8]
) {
const TEXT = $reverse("Hello World!\n\r");
always {
letter = TEXT[index];
}
}Le texte du message sous la forme dãune chaûÛne de caractû´res "Hello World!\n\r" est stockûˋ en ROM. En sortie, vous aurez le code ASCII letter û lãindice de position index de la chaûÛne.
Par exemple si index=0, la sortie sera le code ASCII du premier caractû´re ô¨ô Hô ô£, etc. û noter que la chaûÛne doit ûˆtre retournûˋe avant dãûˆtre stockûˋe (fonction $reverse) pour sortir le message dans le bon ordre.
En amont, on a donc besoin dãun compteur counter dont la fonction est de faire varier lãindice de position dans la chaûÛne de caractû´res entre 0 et 13, 13 ûˋtant la position du dernier caractû´re \r de la chaûÛne.
Lãenvoi des codes ASCII par ce controller est gûˋrûˋ par une machine û ûˋtats finis grûÂce û lãinstanciation dãun nouveau type fsm. Le type fsm est semblable au type dff pour les bascules D avec son entrûˋe d et sa sortie q, û lãexception que ces derniû´res sont des ûˋtats.
On donne lãextrait du code correspondant au fonctionnement de cette machine û ûˋtatsô :
.clk(clk) {
.rst(rst) {
fsm state = {IDLE, TX};
// ...
}
}
// ãÎ
always {
myMessage.index = counter.q;
ctl_tx_data = myMessage.letter;
ctl_tx_new = 0; // default to 0
case (state.q) {
state.IDLE:
counter.d = 0;
if (ctl_start) {
state.d = state.TX;
}
state.TX:
if (!ctl_tx_busy) {
counter.d = counter.q + 1;
ctl_tx_new = 1;
if (counter.q == NUM_LETTERS - 1)
state.d = state.IDLE;
}
}
}
}Lãinstance state peut prendre deux ûˋtatsô : un ûˋtat repos IDLE, et un ûˋtat TX pour indiquer une transmission dãun code ASCII en cours. Les actions et les transitions sont gûˋrûˋes dans le bloc case comme en C/C++. û lãûˋtat repos, lãindice de position est remis û 0 et on attend le signal start pour dûˋmarrer la transmission. û lãûˋtat actif TX, on envoie les codes ASCII un par un en incrûˋmentant lãindice de position jusquãau dernier caractû´re de la chaûÛne, et on retourne û lãûˋtat repos IDLE.
Ci-aprû´s le code complet des diffûˋrents modules, nãoubliez pas de rajouter le composant de bibliothû´que UART TX avec le sûˋlecteurô :
VIII. Conclusion▲
Il y a un monde entre les microcontrûÇleurs et les FPGA. Les premiers ont une structure comparable û celle dãun ordinateur intûˋgrûˋ dans une puce unique avec des pûˋriphûˋriques et de la mûˋmoire. On les programme en C ou C++ (en gûˋnûˋral) pour effectuer des tûÂches simples en suivant le jeu dãinstructions fourni pour accûˋder aux ressources intûˋgrûˋes dans la puce. En face, les FPGA sont par nature trû´s basiques, des cellules logiques par milliers, voire par millions, ce qui les rend trû´s flexibles pour rûˋpondre û nãimporte quelle fonctionnalitûˋ logique, du moment que le nombre de cellules est suffisant. Rien ne vous empûˆche de configurer votre FPGA avec 20 gûˋnûˋrateurs de signaux PWM ou 5 ports sûˋrie UART si vous en avez besoin, alors que le nombre de ces pûˋriphûˋriques est figûˋ et limitûˋ dans un microcontrûÇleur classique. Cette flexibilitûˋ peut vous permettre en phase de conception de valider le fonctionnement de vos circuits numûˋriques.
Une consûˋquence de la nature des FPGA est que les tûÂches configurûˋes dans les circuits peuvent ûˆtre hautement parallûˋlisûˋes. Les deux blinkers du premier exemple vu plus hautClignotement de LED agissent ô¨ô en mûˆme tempsô ô£, et on aurait pu implûˋmenter le PWM du deuxiû´me exempleJouer avec la luminositûˋ des LED avec un signal PWM et la rûˋaction sur appui du bouton-poussoir du troisiû´me exemplePiloter une LED avec un bouton-poussoir, le tout fonctionnant en parallû´le. Sur microcontrûÇleur, vous auriez dû£ jouer avec les interruptions, programmer des machines û ûˋtats finis ou passer par un OS temps rûˋel, car les traitements du processeur sont sûˋquentiels par nature. Beaucoup dãalgorithmes de traitement dãimages par exemple sont naturellement parallû´les et mûˋritent une mise en éuvre sur FPGA.
Pour autant, sãil faut peser le pour et le contre au moment du choix entre un microcontrûÇleur et un FPGA, il faudra aussi tenir compte du coû£t et de la consommation dãûˋnergie tous deux plus ûˋlevûˋs sur FPGA. Et en phase de dûˋveloppement, le temps nûˋcessaire pour la synthû´se du projet sur FPGA peut en rebuter plus dãun (mais on peut faire de la simulation comportementale avant de commencer la synthû´se).
Du point de vue du programmeur, des efforts ont ûˋtûˋ faits pour que les programmeurs C/C++ retrouvent une syntaxe familiû´re en Lucid. Il faut toutefois prendre conscience quãune ligne du typeô :
c = a ^ b; // c = a XOR bqui sãûˋcrit de la mûˆme faûÏon en C ou en Lucid, produira des effets diffûˋrentsô :
- en C, vous programmez une affectation de la variable c rûˋsultant dãun XOR entre deux autres variables a et b en mûˋmoire (par exemple pour un microcontrûÇleur 8ô bits AVR, avec lãinstruction EOR, Exclusive OR)ô ;
- en Lucid, vous allez synthûˋtiser une porte logique XOR dont les entrûˋes sont des signaux a et b, et dont la sortie sera dirigûˋe vers un port c.
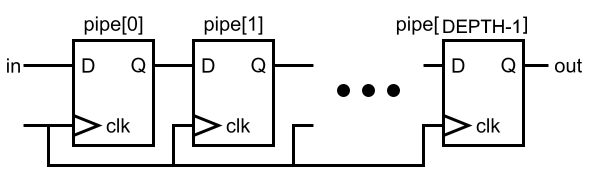
De mûˆme, si vous imaginez facilement le fonctionnement dãune boucle for en langage C/C++ pour effectuer un traitement rûˋpûˋtitif, en langage Lucid vous pouvez trû´s bien ûˋcrireô :
for (i = 1; i < DEPTH; i++)
pipe.d[i] = pipe.q[i-1];Dans ce cas, la boucle permet de synthûˋtiser des connexions en les dupliquant.
Personnellement, jãai trouvûˋ ce langage quãest Lucid trû´s efficace pour rûˋaliser les prototypes de mes dûˋmonstrations. Il nãest pas ûˋvident pour un dûˋveloppeur logiciel de raisonner ô¨ô hardwareô ô£ sans un minimum de culture en ûˋlectronique numûˋrique. Jãespû´re malgrûˋ tout que ce tutoriel vous aidera û mettre un pied û lãûˋtrier, cãest le but de la plateforme Alchitry.
Objectif suivantãÎ sãinitier au langage Verilog, toujours sur la plateforme Alchitryô !
Je remercie Vincent PETIT pour sa relecture technique et Claude Leloup pour ses corrections orthotypographiques.
