



I. MatÃĐriels▲
|
MatÃĐriel |
Description |
|---|---|
 |
|
 |
|
 |
|
|
|
 |
|
  |
|
II. Configuration initiale du kit▲
La logique de commande du module de puissance L298N fonctionne en 5Â V. On sÃĐlectionnera cette tension sur la carte du kit PSoC en positionnant le cavalier d'alimentation du sÃĐlecteur J9 sur VDDÂ =Â 5Â VÂ :

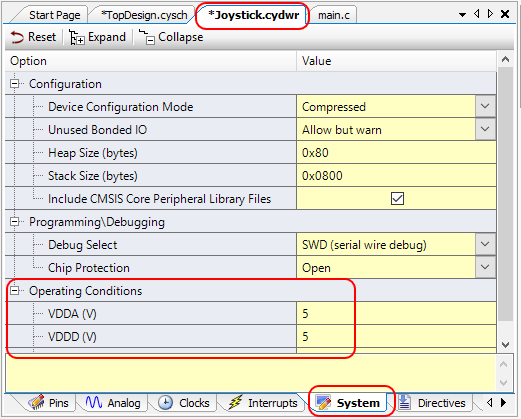
Vous devez ÃĐgalement renseigner la configuration en 5 V dans l'environnement PSoC Creator. Dans l'onglet avec l'extension .cydwr, sÃĐlectionnez l'onglet System en bas de la fenÊtre. Renseignez les champs VDDA et VDDD avec la nouvelle configuration (au besoin, redÃĐmarrez PSoC Creator pour prendre en compte les changements) :
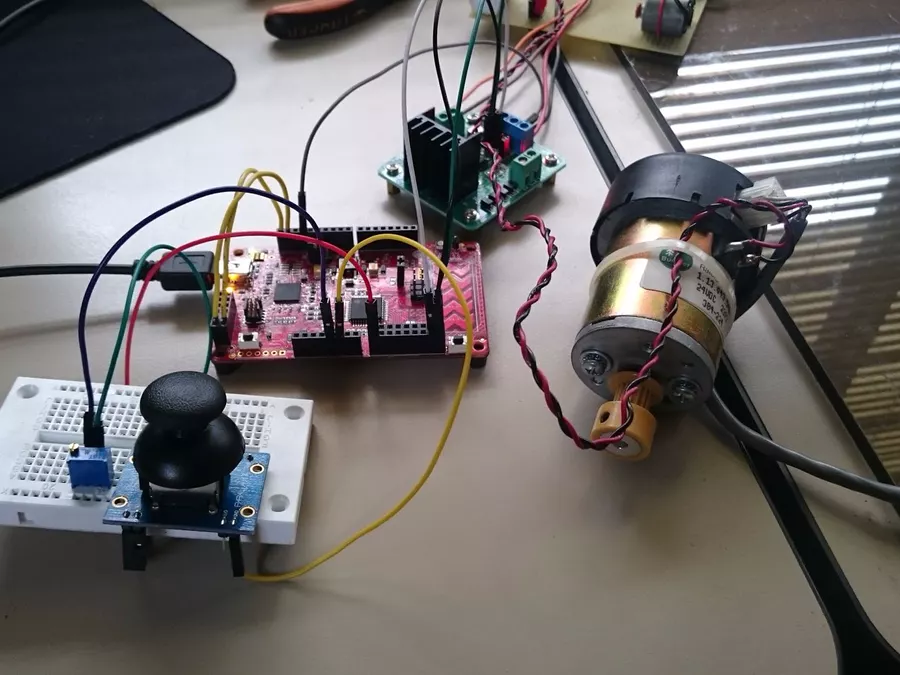
III. Pilotage du moteur▲
Typiquement, le schÃĐma de cÃĒblage du module est le suivant :
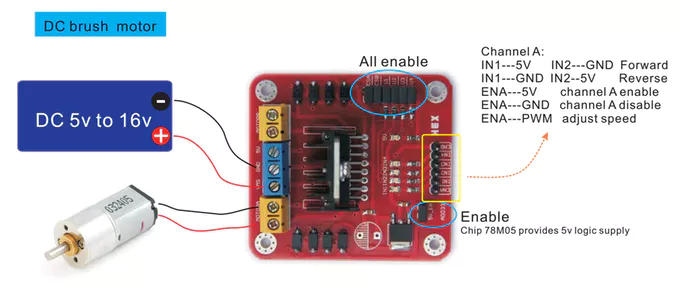
Au niveau du pilotage, les broches IN1 et IN2 permettent de sÃĐlectionner le sens de rotation du moteur (IN1=5 V, IN2=0 V en marche avant ; IN1=0 V, IN2=5 V en marche arriÃĻre).
Pour cela, on utilisera un registre de contrÃīle (control register) dirigÃĐ vers deux connecteurs de la carte PSoC configurÃĐs en sorties (P1[1] et P1[2]). Cette façon d'interagir avec les sorties est bien plus efficace que d'ÃĐcrire directement sur chaque broche.
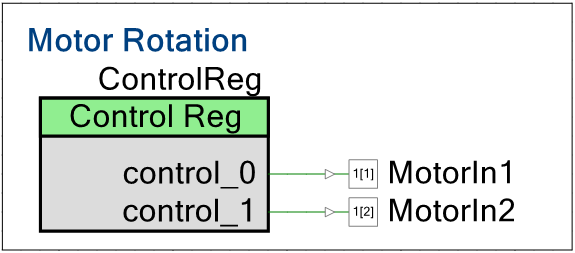
Dans le code, on dÃĐfinit les deux valeurs possibles du registre 2 bits :
- 0x01, pour IN1=1 et IN2=0 (sens antihoraire ou CounterClockWise)Â ;
- 0x02, pour IN1=0 et IN2=1 (sens horaire ou ClockWise).
Ãcriture dans le registre de contrÃīle du sens de rotation :
#define CCW() ControlReg_Write(0x01);
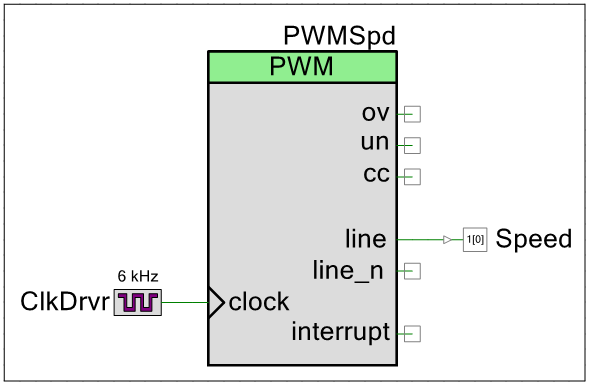
#define CW() ControlReg_Write(0x02);La broche Enable A (ou ENA) permet de contrÃīler la vitesse de rotation du moteur : 0 V à l'arrÊt, 5 V à pleine vitesse. Un signal modulÃĐ en largeur d'impulsion PWM (Pulse Width Modulation) permet de faire varier la vitesse en jouant sur le rapport cyclique (duty cycle). Le but est donc de diriger un gÃĐnÃĐrateur de signaux PWM vers une sortie de la carte PSoC :
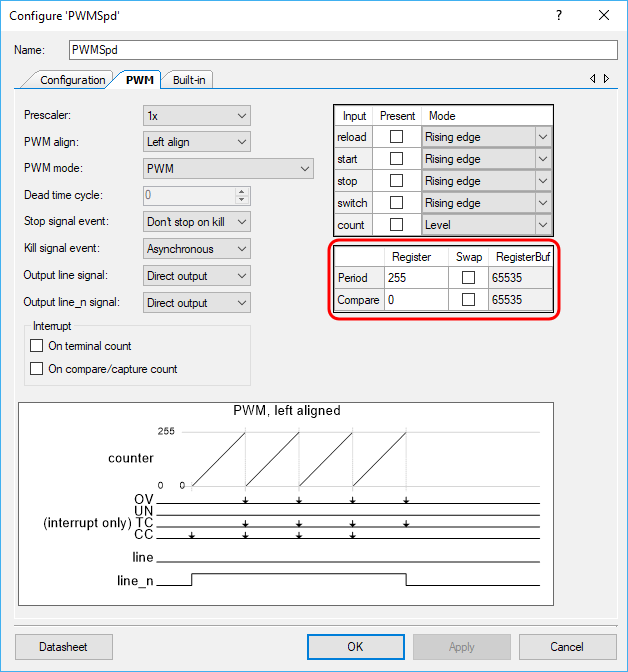
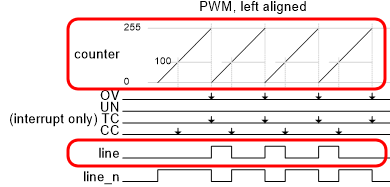
Le paramÃĻtre Period est fixÃĐ Ã 255, et initialement le paramÃĻtre Compare est à 0 (ce qui revient à gÃĐnÃĐrer un signal de sortie à 0 V) :
 |
 |
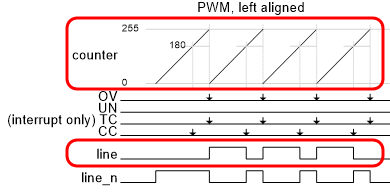 |
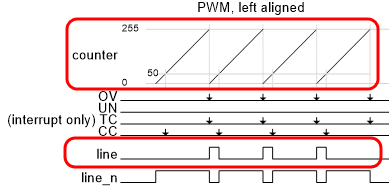
Depuis la boÃŪte de configuration, on peut voir dans le tableau ci-dessus l'influence du paramÃĻtre Compare sur la largeur d'impulsion. Sur dÃĐbordement du compteur, la sortie bascule à l'ÃĐtat haut et le compteur repart à zÃĐro. Lorsque le compteur atteint la valeur Compare, la sortie bascule à l'ÃĐtat bas. Avec une horloge à 6 kHz, le compteur est incrÃĐmentÃĐ toutes les 1/6000 s.
Pour modifier le paramÃĻtre Compare par le code :
PWMSpd_WriteCompare(uint32 compare);IV. Signal analogique de commande du mini-Joystick▲
Ici, on exploite le mouvement du joystick suivant une seule direction (le potentiomÃĻtre de direction horizontale par exemple) pour faire varier plus ou moins la vitesse du moteur dans les deux sens de rotation.
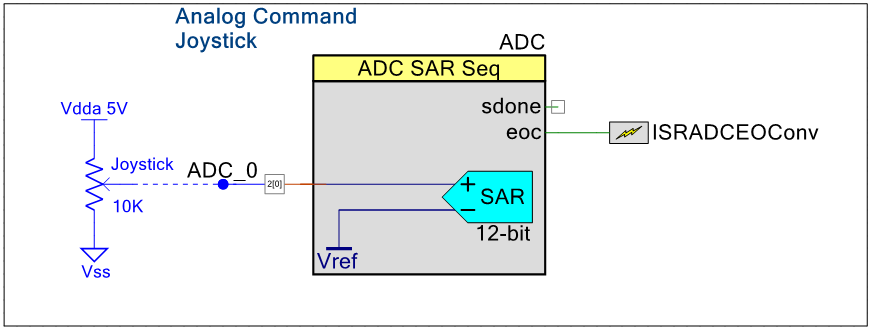
Dans PSoCÂ Creator, on configure une entrÃĐe analogique (connecteur P2[0]) que l'on dirige vers un convertisseur analogique-numÃĐrique par approximations successives (ADC SAR). La sortie End of Conversion (eoc) du composant est dirigÃĐe vers un composant ISR (Interruption Service Routine)Â :
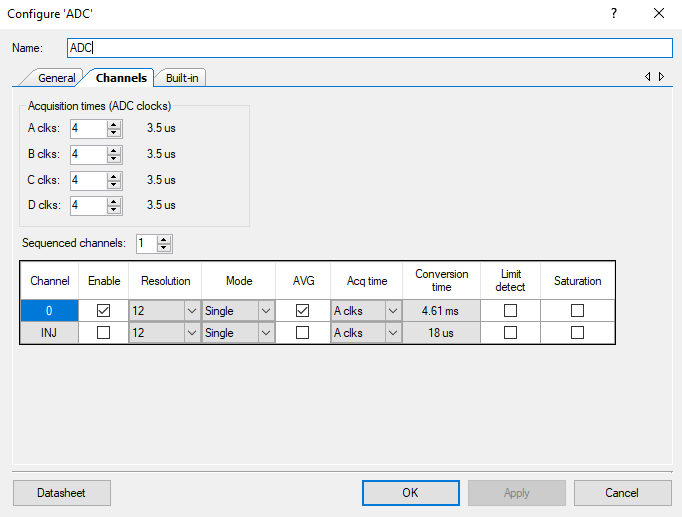
La configuration du convertisseur analogique-numÃĐrique est la suivante :
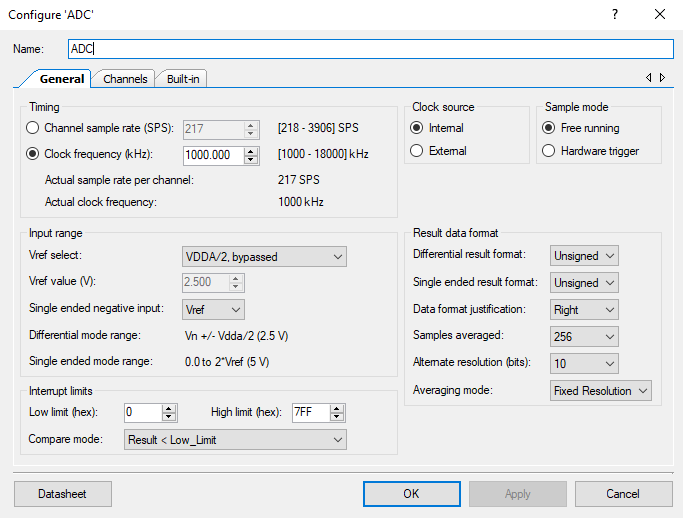
Pour obtenir une conversion 12 bits en mode asymÃĐtrique (single ended), il faut connecter Vref à l'entrÃĐe nÃĐgative. Dans ce cas, la plage de conversion est entre 0 et 2xVref. SÃĐlectionnez le format Unsigned pour le rÃĐsultat en sortie.
Un front montant sur la sortie eoc (End Of Conversion) du convertisseur produira une interruption (composant ISR nommÃĐ ISRADCEOConv) Ã chaque fin de cycle de conversion.
La routine d'interruption sur fin de conversion (eoc) est dÃĐfinie ci-dessous :
CY_ISR(ADCEOC) {
static uint8 calibration = 1;
int16 adcCountsA = ADC_GetResult16(CHA);
if (calibration) {
calibration = 0;
joystickzero = adcCountsA;
} else {
dutyc = (float32)adcCountsA / joystickzero - 1.;
flagEOC = 1;
}
}ADC_GetResult16(CHA) retourne le rÃĐsultat issu de la conversion analogique-numÃĐrique contenu dans le registre du convertisseur dans un mot 16 bits. Avec une rÃĐsolution de 12 bits : 0 pour 0 V, 4095 pour 5 V. RÃĐsolution en volt = 1,2 mV.
Le rÃĐsultat de la premiÃĻre conversion est stockÃĐ dans la variable joystickzero afin de calibrer le joystick en position neutre au dÃĐmarrage du systÃĻme. Sinon on calcule la variable dutyc, valeur signÃĐe en fonction du sens de rotation demandÃĐ, qui servira à redÃĐfinir le paramÃĻtre Compare du gÃĐnÃĐrateur PWM et faire varier ainsi le rapport cyclique. Un drapeau flagEOC signale la fin de la conversion.
Dans la boucle principale, on lance la fonction motoroutput() à chaque cycle de conversions achevÃĐ afin de reconfigurer le rapport cyclique du gÃĐnÃĐrateur PWM et activer un sens de rotation :
if (flagEOC) {
flagEOC = 0;
motoroutput(dutyc);
}#define PWMmaxcomp 254 //Period 255
void motoroutput(float32 dc) {
int16 compare = dc * PWMmaxcomp;
if ((dc >= 0) && (dc <= 1)) {
PWMSpd_WriteCompare(compare);
CCW();
} else if ((dc < 0) && (dc >= -1)) {
PWMSpd_WriteCompare(-compare);
CW();
}
}V. Le design et le code complet du projet▲

#include <project.h>
//ADC param
#define CHA (0u)
volatile uint8 flagEOC = 0;
volatile float32 dutyc = 0.;
int16 joystickzero = 0;
//Motor param
#define CCW() ControlReg_Write(0x01);
#define CW() ControlReg_Write(0x02);
#define PWMmaxcomp 254 //Period 255
void motoroutput(float32);
CY_ISR(ADCEOC) {
static uint8 calibration = 1;
int16 adcCountsA = ADC_GetResult16(CHA);
if (calibration) {
calibration = 0;
joystickzero = adcCountsA;
} else {
dutyc = (float32)adcCountsA / joystickzero - 1.;
flagEOC = 1;
}
}
void motoroutput(float32 dc) {
int16 compare = dc * PWMmaxcomp;
if ((dc >= 0) && (dc <= 1)) {
PWMSpd_WriteCompare(compare);
CCW();
} else if ((dc < 0) && (dc >= -1)) {
PWMSpd_WriteCompare(-compare);
CW();
}
}
int main() {
CyGlobalIntEnable; /* Enable global interrupts */
ISRADCEOConv_StartEx(ADCEOC);
PWMSpd_Start();
ADC_Start();
ADC_IRQ_Enable();
ADC_StartConvert();
//CyDelay(50);
for (;;) {
if (flagEOC) {
flagEOC = 0;
motoroutput(dutyc);
}
}
}VI. Note de la rÃĐdaction▲
Nous remercions Juan Esteban Paz de nous avoir autorisÃĐs à reprendre les travaux de son projet Joystick Controlled DC Motor w/H-Bridge pour ce tutoriel.
Nous remercions ÃĐgalement les membres de la rÃĐdaction de developpez.com pour le travail de traduction et de relecture qu'ils ont effectuÃĐ, en particulier : f-leb, Delias, Vincent PETIT et ClaudeLELOUP.
