



I. Introduction : les kits Cypress PSoC et lâEDI PSoC Creator▲
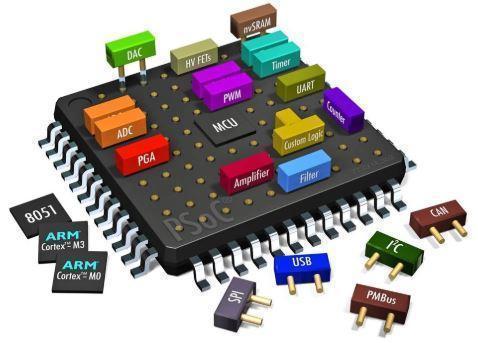
Les Socs du fabricant de semi-conducteurs amÃĐricain Cypress (acquis rÃĐcemment par le groupe Infineon), appelÃĐs PSoC pour Programmable System on Chip, sont des circuits intÃĐgrÃĐs rassemblant sur une seule puce à microcontrÃīleur : un CPU (ARM Cortex 32 ou 64 bits), de la mÃĐmoire statique et dynamique, des entrÃĐes-sorties, parfois avec divers modules pour la communication sans fil (Wi-Fi, BluetoothâĶ), des capteurs et toute une gamme de pÃĐriphÃĐriques et dâunitÃĐs fonctionnelles analogiques et numÃĐriques.
La particularitÃĐ des PSoC en plus dâÊtre programmables, est quâils prÃĐsentent des unitÃĐs configurables, ce qui permet aux ingÃĐnieurs et makers de concevoir des sous-systÃĻmes cÃĒblÃĐs mixtes, numÃĐriques ou analogiques, dÃĐchargeant le CPU de tÃĒches coÃŧteuses ou rÃĐpÃĐtitives.
Pour vous donner un aperçu sur lâarchitecture des PSoC, imaginez le code suivant implantÃĐ dans un microcontrÃīleur classique :
if (Input1_Read() && !Input2_Read()){
LED_Pin_Write(1); // Allumer LED
}
else {
LED_Pin_Write(0); // Eteindre LED
}Au lieu de ce code, vous pouvez rÃĐaliser le schÃĐma simple ci-dessous en cÃĒblant des portes logiques dans PSoC Creator :
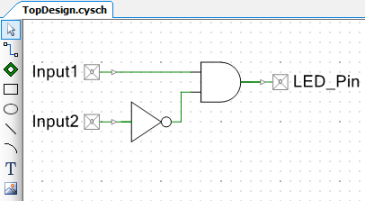
à la gÃĐnÃĐration du projet, les unitÃĐs logiques du processeur PSoC sont reconfigurÃĐes afin dâactiver les portes logiques, et les entrÃĐes-sorties sont routÃĐes suivant les indications du schÃĐma. Avec ce sÃĐquenceur cÃĒblÃĐ, aucun cycle nâest consommÃĐ par le CPU.
Pour dÃĐcouvrir les kits de dÃĐveloppement PSoC de Cypress et leur EDI PSoC Creator, vous pouvez consulter les tutoriels suivants :
Ainsi, mÊme si la communautÃĐ Arduino continue de grandir, je reste fidÃĻle à ma carte PSoC 4 et son EDI (Environnement de Design IntÃĐgrÃĐ) PSoC Creator.
La carte CY8CKIT-042 du PSoC 4 Pioneer Kit que je ressors donc à nouveau pour lâoccasion comporte une glissiÃĻre axiale (slider) sensitive en surface de la carte sur le cÃītÃĐ.

Les applications de cette glissiÃĻre sont nombreuses. On peut par exemple reproduire le fonctionnement dâune roulette mÃĐcanique pour faire monter ou descendre quelque chose (un store dÃĐroulant, un niveau sonore ou de luminositÃĐ, etc.)
Dans cet article, on propose de dÃĐcouvrir comment exploiter le contrÃīleur CapSense pour les boutons sensitifs à dÃĐtection capacitive dans lâEDI PSoC Creator.
II. Les boutons mÃĐcaniques vs boutons sensitifs▲
Les boutons mÃĐcaniques restent encore largement utilisÃĐs, mais ils prÃĐsentent pourtant des inconvÃĐnients :
- ils deviennent moins fiables et s'usent avec le temps à cause des parties mÃĐcaniques en mouvement ;
- l'humiditÃĐ et la poussiÃĻre s'infiltrent à cause des jeux de fonctionnement entre les parties fixes et mobiles du bouton ;
- consÃĐquence de l'usure et de l'encrassement des contacts avec le temps, il faut appuyer de plus en plus fort sur le bouton ;
- un bouton mÃĐcanique est un assemblage de piÃĻces coÃŧteuses à fabriquer avant de les assembler ;
- pour loger les boutons, il faut souvent dÃĐcouper des ouvertures dans des panneaux ou dans les coques de boÃŪtier ;
- pour couronner le tout, ils ne sont pas toujours trÃĻs esthÃĐtiques.
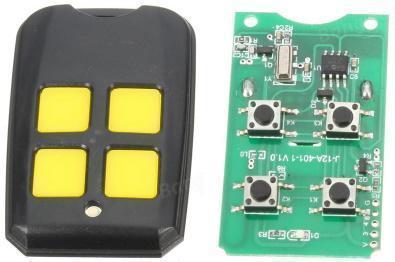
à cÃītÃĐ de cela, une infime pression, voire un simple effleurement du doigt sur un bouton sensitif suffit pour dÃĐclencher une action. Vous retrouvez maintenant ces dispositifs sensitifs sur de nombreux appareils modernes : smartphones, tablettes, imprimantes, chaÃŪnes Hi-Fi, ÃĐcrans plats, produits ÃĐlectromÃĐnagers, etc.
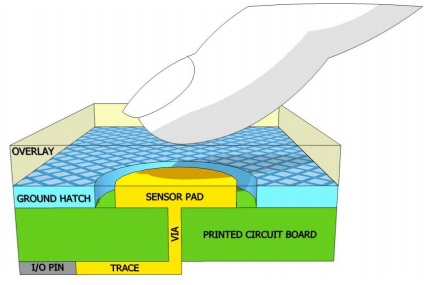
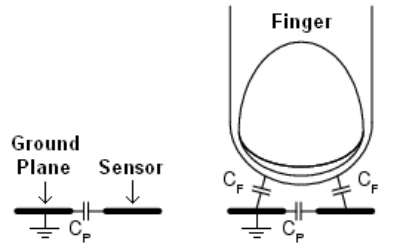
La technologie dÃĐveloppÃĐe par Cypress (nommÃĐe CapSenseÂŪ) permet la dÃĐtection de la perturbation de capacitÃĐ ÃĐlectrique à l'approche du doigt :
LâÃĐlectronique du contrÃīleur et le firmware fournis par le constructeur permettent une dÃĐtection fiable avec une grande immunitÃĐ aux bruits. Le systÃĻme est capable de filtrer les ÂŦ fausses touches Âŧ dues par exemple à la projection de liquide sur la surface sensitive.

III. Technologie CapSense▲
Ainsi, lorsque vous approchez votre doigt du revÊtement conducteur (overlay), la capacitÃĐ parasite initiale CP en lâabsence de toucher entre les ÃĐlectrodes augmente pour devenir : CS=CP+CF
Un circuit spÃĐcialisÃĐ permet d'adapter le signal analogique perturbÃĐ par un changement de capacitÃĐ en une valeur numÃĐrique issue d'un comptage d'impulsions (valeur nommÃĐe raw count)Â :
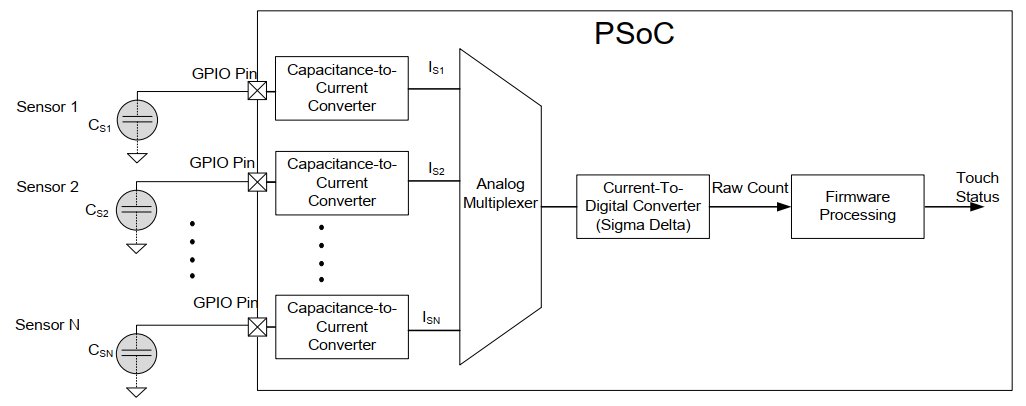
Par exemple, quand le doigt s'approche du capteur, la capacitÃĐ CS augmente ce qui gÃĐnÃĻre une augmentation du courant ÃĐlectrique dans le circuit. Un signal modulÃĐ dont la frÃĐquence augmente est alors produit, et on compte le nombre dâimpulsions dans une fenÊtre de temps pour en sortir une valeur numÃĐrique :
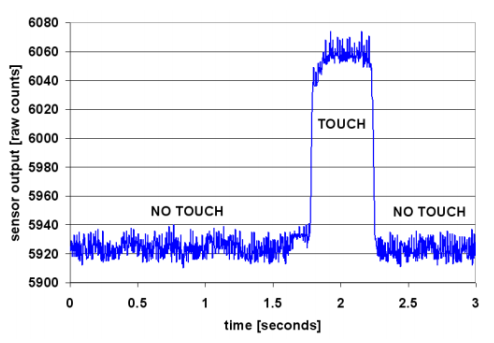
Lâaugmentation de la valeur produite en sortie à lâapproche du doigt est donc proportionnelle à l'augmentation de la capacitÃĐ en pF (picofarad). Le firmware traite alors lâinformation et est capable dâinterprÃĐter sâil y a dÃĐtection d'une touche ou non.
IV. Les touches sensitives dans les kits Cypress PSoC▲
Cypress propose de nombreux kits ÃĐquipÃĐs de touches sensitives CapSense, notamment sur ses cartes de dÃĐveloppement à microcontrÃīleur PSoC 4. Si mon kit rÃĐfÃĐrencÃĐ CY8CKIT-042 comprend une glissiÃĻre axiale, le kit CY8CKIT-044, par exemple, permet la dÃĐtection de mouvements plus complexes (control gesture) avec la forme et la disposition particuliÃĻre de ses cinq boutons sensitifs :

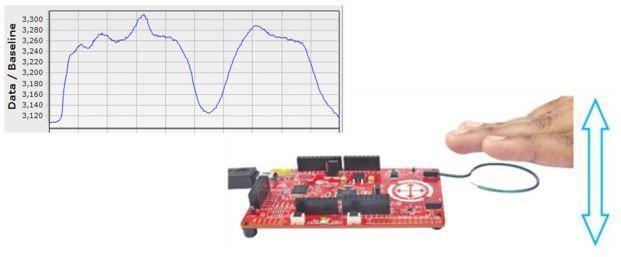
Avec ce mÊme kit, deux ports disponibles sur le cÃītÃĐ de la carte permettent la mise en Åuvre dâune dÃĐtection de proximitÃĐ capacitive :
Le plus rÃĐcent CY8CKIT-062-BLE (32-bit ARM Cortex-M4 PSoC 6) est ÃĐquipÃĐ dâune glissiÃĻre axiale et de deux boutons sensitifs CapSense :

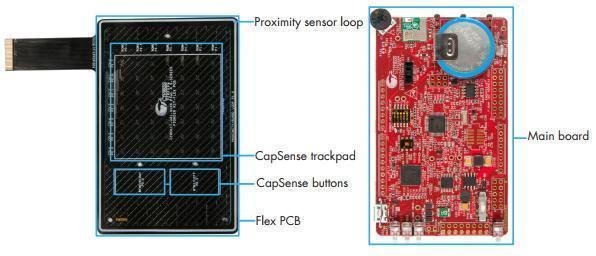
Plus original, le kit CY8CKIT-041-41XX PSoC 4100S quant à lui comprend une carte embarquÃĐe PSoC 4100S à clipser dans un boÃŪtier :

Le boÃŪtier est fermÃĐ avec une surface sensitive raccordÃĐe à la carte par une nappe. Celle-ci comporte des boutons ainsi quâun trackpad CapSense (composÃĐ de 7x7 zones sensitives), et permet la dÃĐtection de proximitÃĐ :
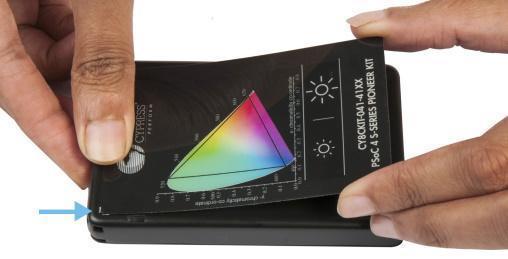
Il reste à recouvrir la surface dâun film personnalisÃĐ, ici pour une application de sÃĐlection de couleur pour allumer une LED, et de tÃĐlÃĐverser son application via la prise USB depuis PSoC Creator :

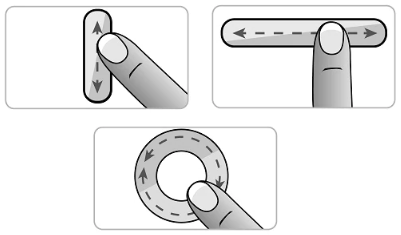
LâAPI propose alors des fonctionnalitÃĐs avancÃĐes de type Trackpads with gestures pour la reconnaissance de mouvements tels que : scroll, flick, swipe, zoom, rotateâĶ avec un ou deux doigts.
V. RÃĐglage et optimisation des performances (tuning)▲
La qualitÃĐ de la dÃĐtection des touches dÃĐpend de nombreux facteurs : fabrication du circuit imprimÃĐ, matÃĐriau et ÃĐpaisseur de la couche de revÊtement de la zone sensitive, dimensions et formes du bouton, environnement extÃĐrieur, etc. Certains rÃĐglages internes au fonctionnement du modulateur CSD ou des paramÃĻtres du firmware relatifs au traitement des valeurs brutes produites en sortie (Raw Count) vont aussi influencer la sensibilitÃĐ.
Tout le processus de rÃĐglage (tuning) consiste justement à dÃĐterminer les valeurs optimales des paramÃĻtres et de maintenir la meilleure sensibilitÃĐ possible au toucher quelles que soient les perturbations qui peuvent se produire dans l'environnement du bouton sensitif.
Comme le processus d'optimisation est un processus itÃĐratif coÃŧteux en temps dans le cycle de dÃĐveloppement, Cypress a mis au point le procÃĐdÃĐ SmartSenseÂŪ, un ensemble d'algorithmes d'autoÃĐtalonnage (auto-tuning) afin de compenser automatiquement les variations d'environnement et garder des performances optimales.
Afin de comprendre les principaux rÃĐglages du capteur CapSense, voyons quelques dÃĐfinitions.
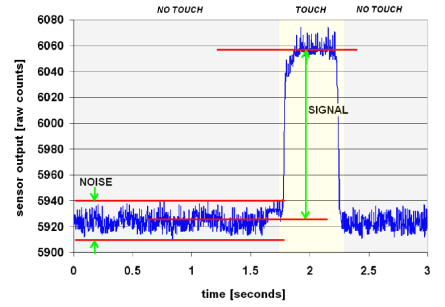
Raw Count : comme cela a ÃĐtÃĐ dit prÃĐcÃĐdemment, les algorithmes et matÃĐriels CapSense traduisent la variation de capacitÃĐ au moment du toucher en une valeur numÃĐrique produite en sortie (comptage d'impulsions). Cette valeur numÃĐrique brute permettra d'indiquer l'ÃĐtat du capteur aprÃĻs traitement.
Baseline â (niveau de rÃĐfÃĐrence) : une rÃĐfÃĐrence doit Être ÃĐtablie en lâabsence de toucher à partir des donnÃĐes filtrÃĐes. En faisant la diffÃĐrence entre les donnÃĐes brutes et le niveau de rÃĐfÃĐrence (raw count - baseline), on obtient un nouveau signal qui permettra aux algorithmes de prendre une dÃĐcision concernant la dÃĐtection de touches.
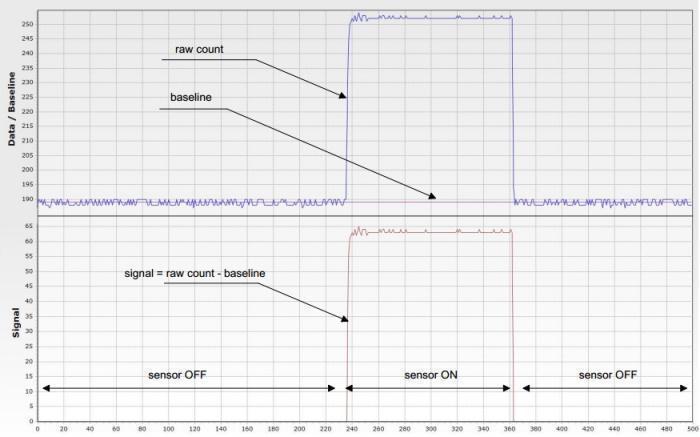
Seulement, cette rÃĐfÃĐrence peut dÃĐriver en fonction des changements dâenvironnement autour du bouton sensitif (tempÃĐrature, humiditÃĐ, perturbations ÃĐlectromagnÃĐtiques, etc.) et un soin doit donc Être apportÃĐ Ã la mise à jour de la baseline.
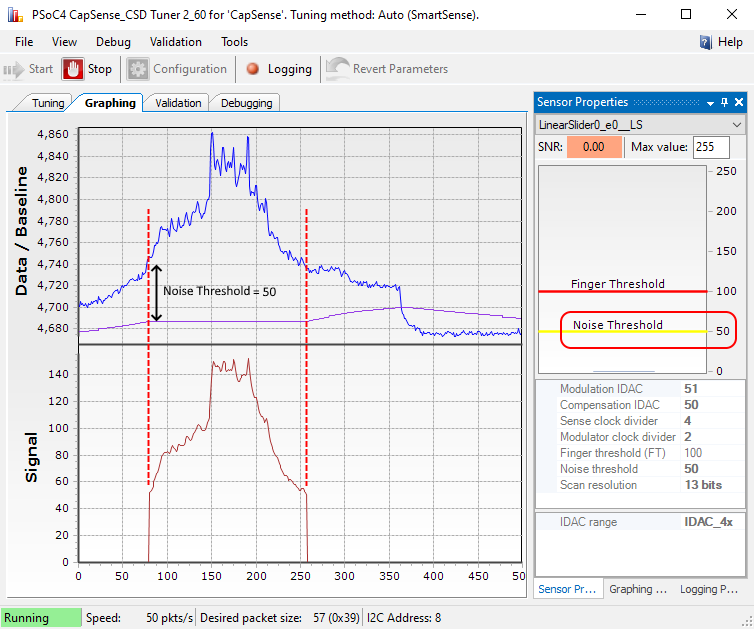
Pour cela, le paramÃĻtre Noise Threshold (seuil de bruit) permet de diffÃĐrencier le signal, du bruit. Si la variation du signal par rapport à la rÃĐfÃĐrence est en dessous de ce seuil, le systÃĻme considÃĻre que la faible variation nâest pas due à lâapproche dâun corps, mais à du bruit ou une dÃĐrive du signal et la baseline est mise à jour ; le signal (raw count â baseline) reste alors 0. Dans le cas contraire, il sâagit dâun corps qui sâapproche et la baseline est maintenue au niveau relevÃĐ juste avant la dÃĐtection de lâapproche du corps, jusquâà ce que le signal redescende quand le corps sâÃĐloigne du bouton.
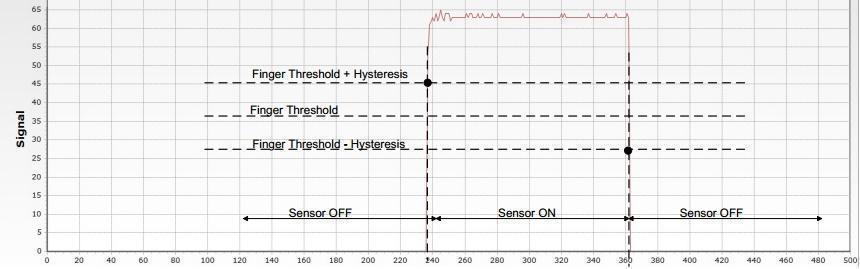
Finger Threshold â (seuil de dÃĐtection de touche) : un paramÃĻtre associÃĐ au paramÃĻtre Hysteresis pour dÃĐterminer lâÃĐtat de dÃĐtection ON/OFF du capteur avec lâÃĐquation :
Ãtat du capteur =
- Touch ON, si Signal âĨ Finger Threshold + Hysteresis
- Touch OFF, si Signal âĪ Finger Threshold â Hysteresis
Pour maintenir les performances optimales et sâadapter aux dÃĐrives et sources de bruit extÃĐrieures, le procÃĐdÃĐ SmartSense prend en charge de gÃĐrer automatiquement la grande majoritÃĐ des 17 paramÃĻtres requis pour le fonctionnement dâun capteur sensitif CapSense. Le bruit peut Être mesurÃĐ en permanence et les diffÃĐrents paramÃĻtres ou seuils sont ajustÃĐs dynamiquement afin de maintenir le rapport signal-bruit (Signal-to-Noise Ratio) le plus ÃĐlevÃĐ possible et ÃĐviter ainsi la dÃĐtection de fausses touches.
Dans les quelques cas particuliers oÃđ lâauto-tuning SmarSense ne donne pas des rÃĐsultats satisfaisants, il vous reste la possibilitÃĐ dâajuster les paramÃĻtres manuellement (Manual-tuning). Il faudra alors vous reporter aux procÃĐdures pas-Ã -pas de rÃĐglages manuels fournies par Cypress (voir la documentation en annexeAnnexe - Documentation Cypress, en particulier le CapSense Design Guide).
VI. Les Widgets CapSense▲
Un widget dÃĐsigne un bouton ou un ensemble de boutons sensitifs qui peuvent Être de formes diffÃĐrentes, et agencÃĐs de façon à former une interface tactile particuliÃĻre avec lâutilisateur : un bouton simple, une matrice de boutons, un pavÃĐ tactile (touchpad), une glissiÃĻre axiale ou radiale, etc.
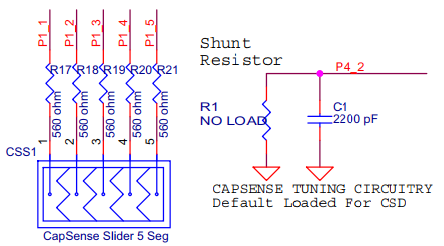
La carte rÃĐfÃĐrencÃĐe CY8CKIT-042 dont je dispose comprend une rangÃĐe de cinq segments sensitifs en double chevron pour former une glissiÃĻre axiale (ports P1[1] Ã P1[5])Â :

La forme en double chevron de la touche nâest pas due au hasard. Le but est dâobtenir une rÃĐponse linÃĐaire de la position estimÃĐe du doigt lorsque celui-ci balaye la glissiÃĻre sur son axe.
IdÃĐalement, lorsque le doigt parcourt la glissiÃĻre dâune extrÃĐmitÃĐ Ã lâautre, il y a recouvrement des signaux de deux segments adjacents comme indiquÃĐ dans la figure ci-dessous :
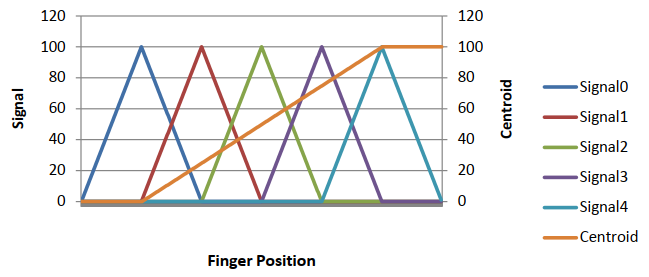
Il est difficile dâobtenir une rÃĐponse linÃĐaire en pratique, et la forme en double chevron des touches est ce qui permet de sâen approcher le plus, mais il faut alors prendre en compte les signaux sur trois segments adjacents pour estimer prÃĐcisÃĐment la position du centroÃŊde (centre de lâaire de contact).
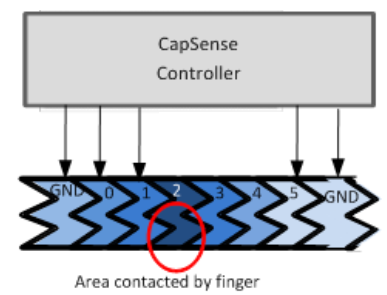
Sur lâimage ci-dessus, le signal sera le plus fort sur le segment 2, mais lâalgorithme CapSense va regarder la force des signaux sur les segments adjacents 1 et 3 pour calculer le centre de lâaire de contact (ou ÂŦ centroÃŊde Âŧ) avec la formule :

Dans lâexemple ci-dessous, le signal est maximal sur le segment 1 (donc X=1, et n=5 pour 5 segments), mais les segments adjacents 0 et 2 sont aussi impactÃĐs.
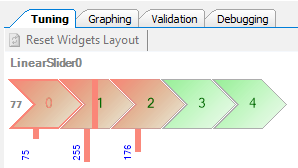
La position du centroÃŊde peut ÃĐvoluer ici entre la position 0 et 255 (resolution=255 par dÃĐfaut). Avec mon doigt quelque part sur le segment 1, la position du centroÃŊde est :
kitxmlcodelatexdvp\left( \frac{176-75}{75+255+176}+ 1 \right) \times \frac{255}{5-1} = 77finkitxmlcodelatexdvpVII. LâAPI CapSense dans PSoC Creator▲
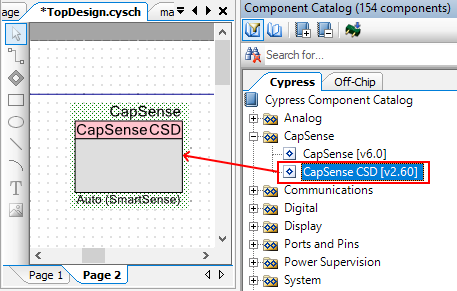
Pour mettre en Åuvre un widget CapSense, il suffit de faire glisser le bloc correspondant depuis le catalogue des composants dans la fenÊtre TopDesign de PSoC Creator.
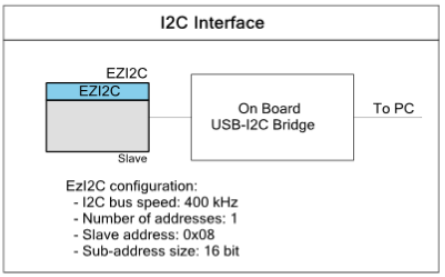
On y dÃĐpose ÃĐgalement un bloc de communication en mode EzI2C. GrÃĒce à lui, le contrÃīleur CapSense pourra envoyer des donnÃĐes et les transmettre au PC via le cÃĒble USB en mode Tuning pour visualiser lâÃĐtat du widget dans une interface graphique et tracer des courbes.
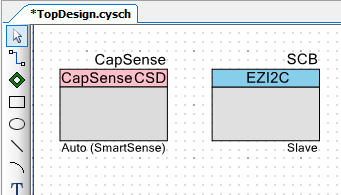
Dans la fenÊtre TopDesign, on a finalement :
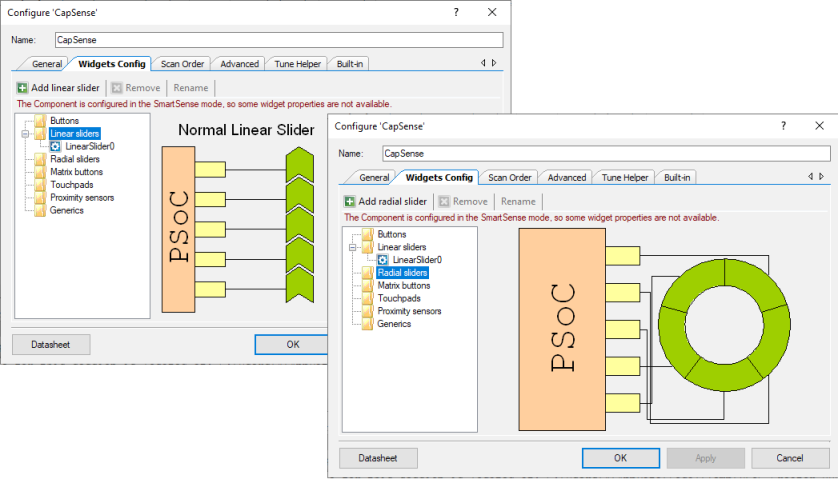
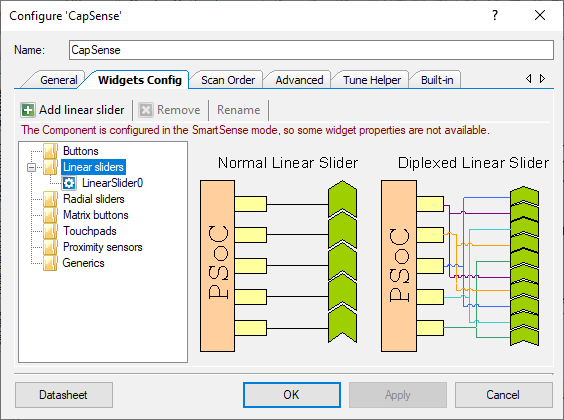
Dans le bloc CapSense, on commence par configurer le widget Linear Slider :
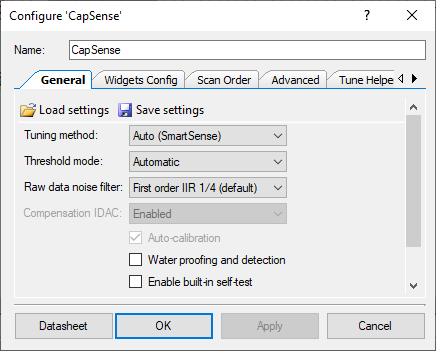
Puis on active le tuning en mode automatique SmartSense :
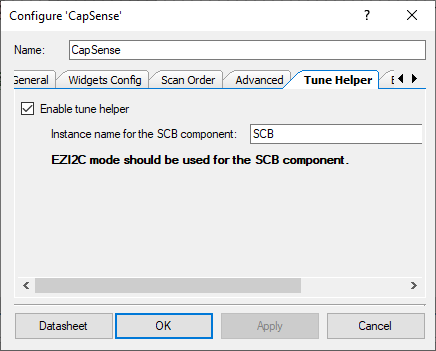
Enfin, on renseigne le nom du bloc de communication qui transmettra les donnÃĐes au PCÂ :
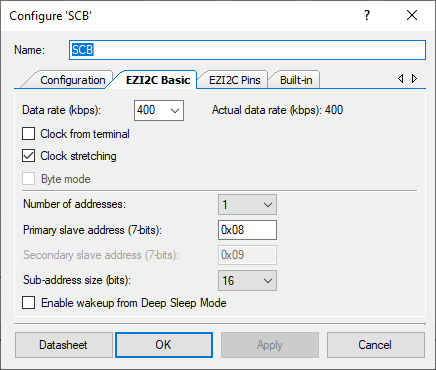
Le bloc de communication (SCB pour Serial Communication Bloc) configurÃĐ en mode EzI2C recevra les paramÃĻtres suivants :
Le programme minimal pour visualiser lâÃĐtat du widget sur le PC est le suivant :
#include "project.h"
int main(void)
{
CyGlobalIntEnable; /* Enable global interrupts. */
CapSense_TunerStart();
while(1)
{
CapSense_TunerComm();
}
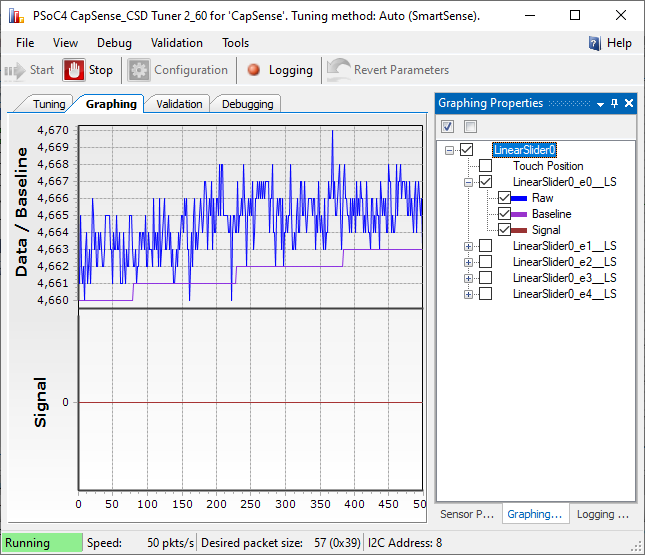
}Une fois le programme tÃĐlÃĐversÃĐ dans la carte, on lance le Tuner :
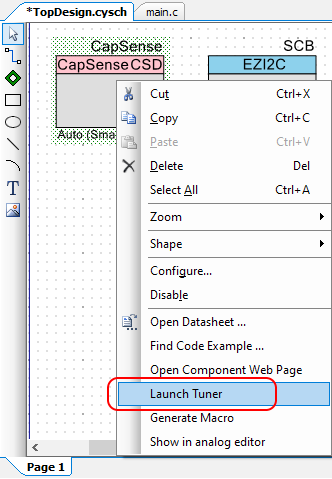
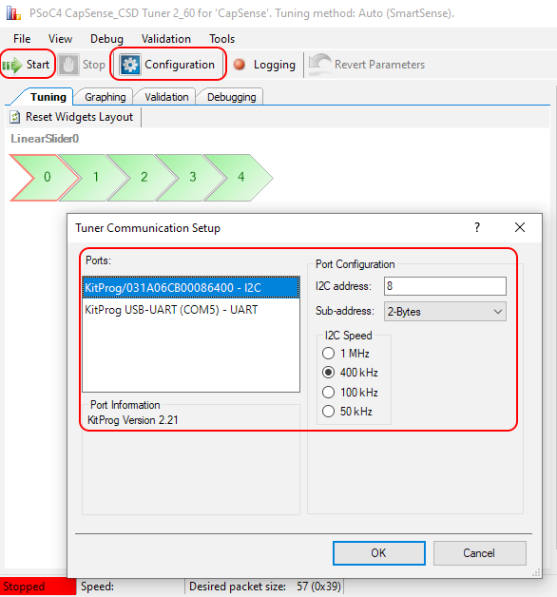
Il reste à configurer les paramÃĻtres de communication, et dÃĐmarrer le tuning en cliquant sur ÂŦ Start Âŧ :
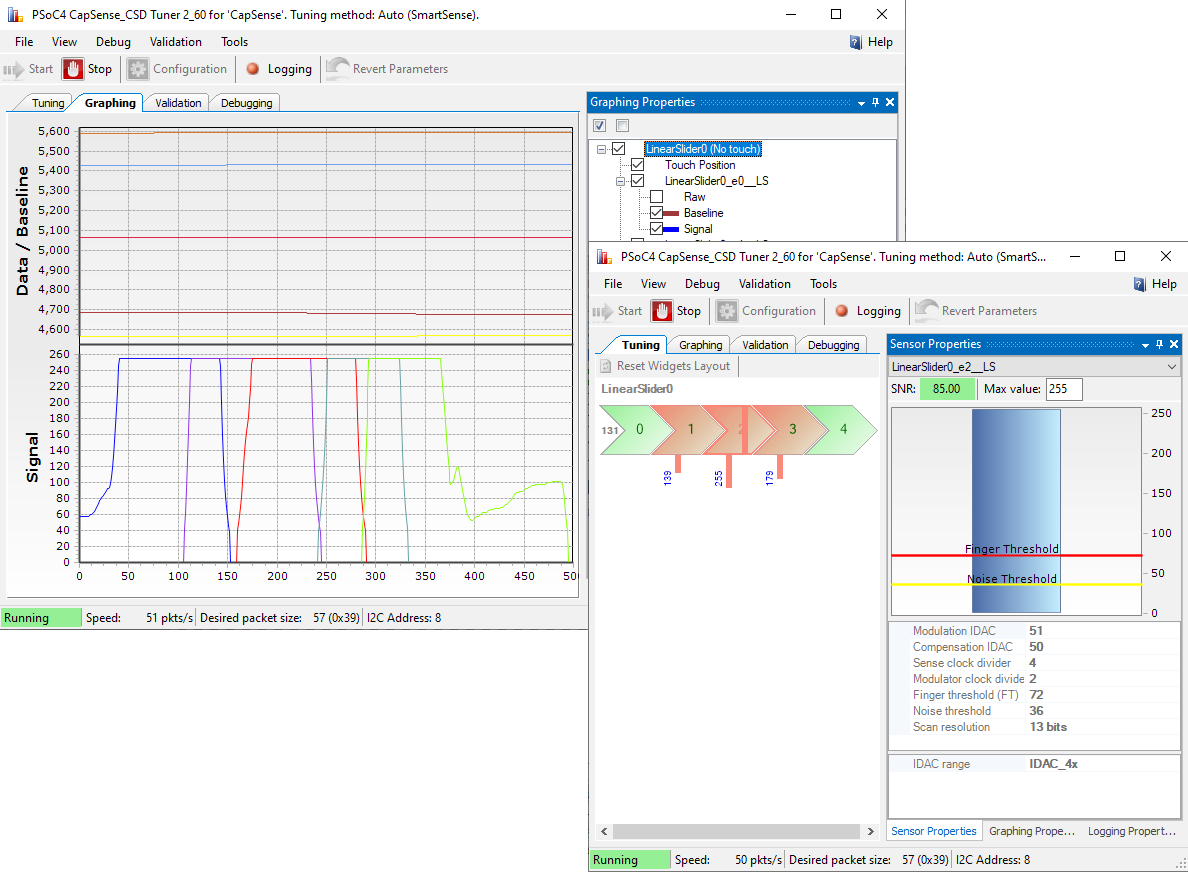
En mode Tuning, vous avez accÃĻs aux caractÃĐristiques du widget en temps rÃĐel :
- position du centroÃŊde ;
- rapport signal-bruit (SNR) par segment ;
- franchissement des seuils par segment (noise threshold, finger threshold)Â ;
- tracÃĐ des signaux segment par segmentâĶ
VIII. Exemple dâutilisation▲
Afin de dÃĐmontrer les possibilitÃĐs, on propose une petite application oÃđ la glissiÃĻre sensitive reproduit le fonctionnement dâune roulette mÃĐcanique pour faire monter ou diminuer la valeur dâun compteur. Un afficheur à LED 7-segments (8 digits) rendra compte de la valeur du compteur en temps rÃĐel.

VIII-A. Design de lâapplication▲
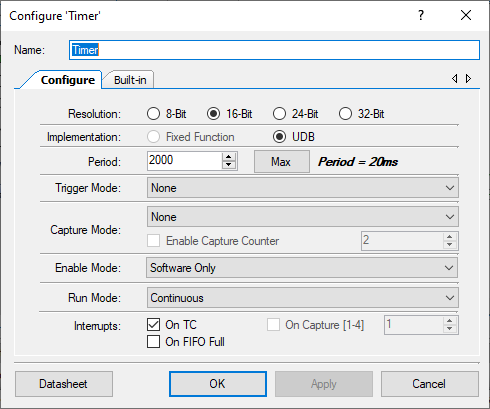
En plus des deux blocs CapSense et EzI2C vus prÃĐcÃĐdemment, les composants Timer et interrupt (isr) sont dÃĐposÃĐs dans la fenÊtre de travail afin de cadencer lâacquisition des donnÃĐes de la glissiÃĻre par interruption, 50 fois par seconde :
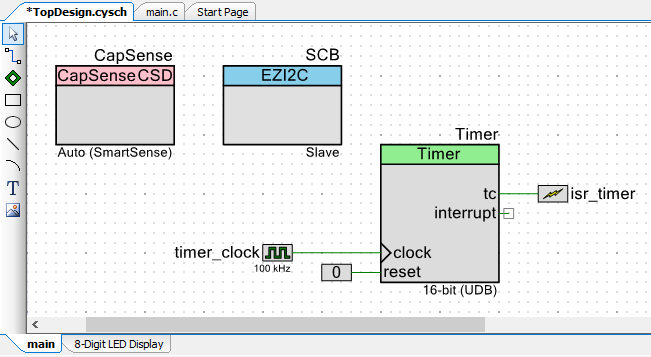
Avec lâhorloge de 100 kHz, la pÃĐriode est rÃĐglÃĐe sur 20 ms et un signal dâinterruption est dÃĐclenchÃĐ en continu à chaque fin de comptage dâune pÃĐriode (Interrupts : On Terminal Count) :
LâAPI du composant Interrupt (nommÃĐ isr_timer ici) propose une fonction isr_timer_StartEx() et une macro CY_ISR pour configurer la table des vecteurs dâinterruption avec lâadresse de la routine fournie en paramÃĻtre.
CY_ISR(myInterrupt) {
// Ici, le code de lâinterruption
}
int main(void)
{
CyGlobalIntEnable; /* autoriser les interruptions */
/* Initialisation, dÃĐmarrage */
Timer_Start();
isr_timer_StartEx(myInterrupt); /* myInterrupt, adresse de la routine dâinterruption */
// ...
}De la sorte, la position du centroÃŊde de la glissiÃĻre est acquise toutes les 20 ms grÃĒce à la fonction CapSense_GetCentroidPos() :
/* Code d'interruption */
CY_ISR(myInterrupt) {
if (! CapSense_IsBusy()){ /* Si acquisition CapSense terminÃĐe */
flag = 1; /* On prÃĐvient le programme principal pour autres traitements */
oldsliderval = sliderval; /* Sauvegarde de la position prÃĐcÃĐdente du centroÃŊde */
sliderval = CapSense_GetCentroidPos(CapSense_LINEARSLIDER0__LS); /* Nouvelle position du centroide */
}
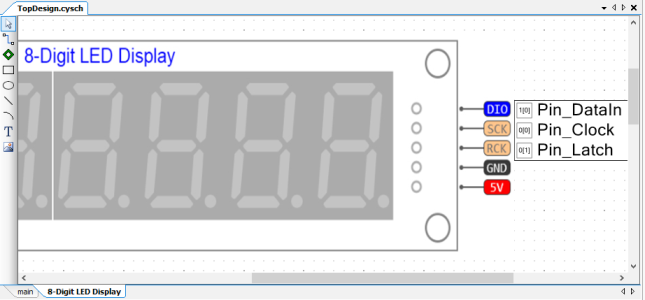
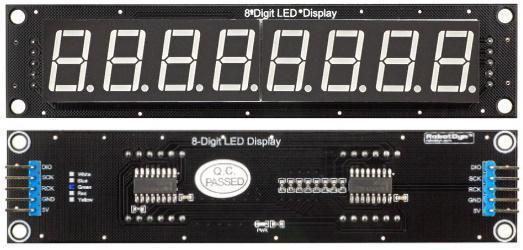
}Dans un deuxiÃĻme onglet de la fenÊtre TopDesign, on configure trois broches en sortie (Pin_DataIn, Pin_Clock, Pin_Latch) pour piloter lâafficheur à LED 7-segments. Lâafficheur à LED 7-segments utilisÃĐ, achetÃĐ chez RobotDyn (101x19 mm), utilise deux registres à dÃĐcalage 74HC595 chaÃŪnÃĐs pour piloter les 8 digits de lâafficheur.
VIII-B. Plan de brochage▲
Ci-dessous, la fenÊtre de lâEDI PSoC Creator montrant le plan de brochage utilisÃĐ :
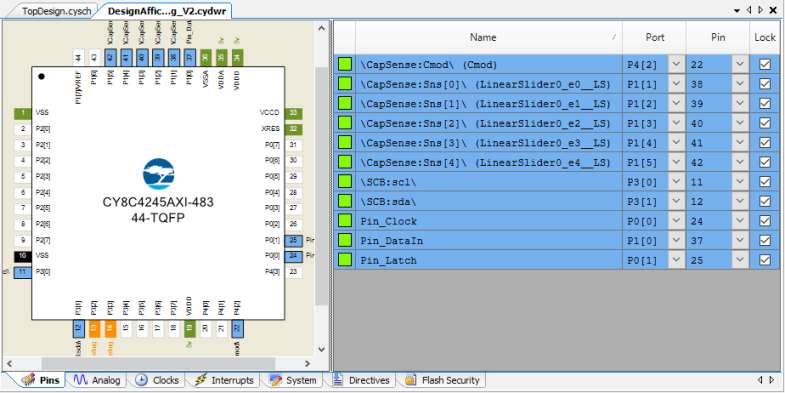
Mis à part les trois broches P0[0], P1[0] et P0[1] choisies et configurÃĐes pour piloter lâafficheur, les cinq autres broches configurÃĐes pour le capteur CapSense et le bloc de communication EzI2C correspondent aux connexions imposÃĐes par le matÃĐriel. Le bloc EzI2C nâest pas utilisÃĐ si le tuning du capteur CapSense est dÃĐsactivÃĐ.
VIII-C. Gestion de lâafficheur▲
Le systÃĻme dâaffichage nâest pas à proprement parler lâobjectif de ce tutoriel. MÊme si lâafficheur 7-segments employÃĐ ici est trÃĻs efficace par sa taille et sa luminositÃĐ, et pour un coÃŧt trÃĻs modique, on aurait pu tout aussi bien utiliser un afficheur LCD, voire rendre compte des valeurs dans un terminal sÃĐrie.
à toutes fins utiles, on donne le code de pilotage de lâafficheur à LED. Le lecteur se reportera à la documentation de la sociÃĐtÃĐ RobotDyn pour plus de dÃĐtails sur les caractÃĐristiques de cet afficheur.
La fonction led_display_7seg_Write() proposÃĐe permet ainsi lâaffichage dâun entier 16 bits non signÃĐ entre 0 et 65535. Attention, le fonctionnement de lâafficheur est multiplexÃĐ. Chaque digit est affichÃĐ tour à tour, il faut donc compter sur la persistance rÃĐtinienne et relancer rÃĐguliÃĻrement la fonction led_display_7seg_Write().
VIII-D. Programme principal▲
Le cÅur du systÃĻme est programmÃĐ comme une machine à ÃĐtats finis (finite state machine).
La glissiÃĻre peut se trouver dans quatre ÃĐtats :
- STANDBYÂ : aucune touche dÃĐtectÃĐe, et en attente (ÃĐtat initial)Â ;
- TAP : touche dÃĐtectÃĐe ;
- DRAGÂ : mouvement axial sur la glissiÃĻre dÃĐtectÃĐÂ ;
- RELEASEÂ : touche relÃĒchÃĐe.
Les transitions entre ÃĐtats successifs sont programmÃĐes en comparant la position courante du centroÃŊde (valeur NO_FINGER si aucune touche dÃĐtectÃĐe, position du centroÃŊde sinon entre 0 et 255) avec la position 20Â ms plus tÃīt.
On donne le programme main.c complet :
#include "project.h"
#include "led_display_7seg.h"
/* DÃĐ-commenter la ligne suivante pour activer le tuner */
//#define ENABLE_TUNER
#define NO_FINGER 0xFFFFu
enum state_capsense_t { STANDBY = 0,
TAP,
DRAG,
RELEASE };
enum state_capsense_t state = STANDBY;
volatile uint16 sliderval = NO_FINGER;
volatile uint16 oldsliderval = NO_FINGER;
volatile uint8 flag = 0;
uint16 counter = 0;
/* Code d'interruption */
CY_ISR(myInterrupt) {
if (! CapSense_IsBusy()){ /* Si acquisition CapSense terminÃĐe */
flag = 1; /* On prÃĐvient le programme principal pour autres traitements */
oldsliderval = sliderval; /* Sauvegarde de la position prÃĐcÃĐdente du centroÃŊde */
sliderval = CapSense_GetCentroidPos(CapSense_LINEARSLIDER0__LS); /* Nouvelle position du centroide */
}
}
int main(void)
{
CyGlobalIntEnable; /* autoriser les interruptions */
/* Initialisation, dÃĐmarrage */
Timer_Start();
isr_timer_StartEx(myInterrupt); /* myInterrupt, adresse de la routine dâinterruption */
#ifdef ENABLE_TUNER
CapSense_TunerStart();
#else
/* DÃĐmarrage, initialisation des baselines, et lancement du scan*/
CapSense_Start();
CapSense_InitializeAllBaselines();
CapSense_ScanEnabledWidgets();
#endif
for(;;)
{
led_display_7seg_Write(counter); /* Affichage du compteur */
if (flag) {
flag = 0;
#ifdef ENABLE_TUNER
CapSense_TunerComm();
#else
/* mise à jour des baselines et relance du scan */
CapSense_UpdateEnabledBaselines();
CapSense_ScanEnabledWidgets();
#endif
uint16 oldpos = oldsliderval;
uint16 newpos = sliderval;
switch(state) {
case STANDBY:
if (newpos != NO_FINGER && oldpos == NO_FINGER){
state = TAP;
}
break;
case TAP:
state = DRAG;
break;
case DRAG:
if (newpos != NO_FINGER) {
counter += newpos - oldpos;
}
else if (newpos == NO_FINGER && oldpos != NO_FINGER){
state = RELEASE;
}
break;
case RELEASE:
state = STANDBY;
break;
default:
break;
}
}
}
}On peut activer le tuning du capteur CapSense en dÃĐ-commentant la ligne avec #define ENABLE_TUNER.
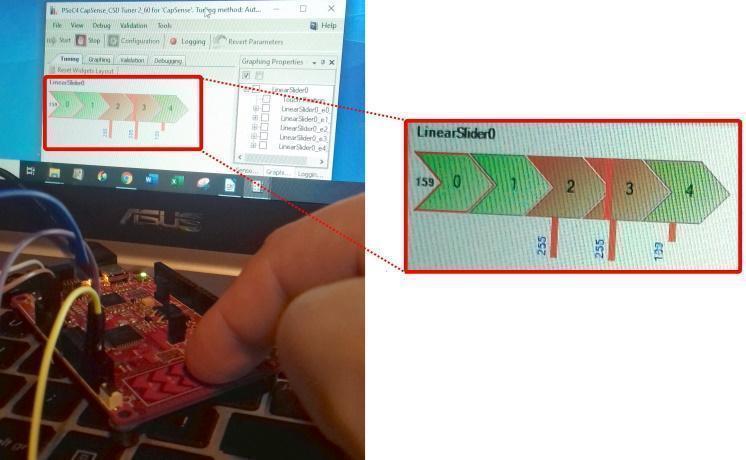
Bien entendu, lâimplantation proposÃĐe ici nâest quâune ÃĐbauche simpliste. Elle ne fait quâincrÃĐmenter ou dÃĐcrÃĐmenter la variable counter en fonction du dÃĐplacement du doigt sur la glissiÃĻre, comme le montre la vidÃĐo de dÃĐmonstration ci-dessous, et rien de plus. Libre à vous de lâadapter pour faire monter ou descendre vos stores dÃĐroulantsâĶ
DÃĐmonstration CapSense PSoC 4
Dans cette autre dÃĐmonstration ci-dessous, on se sert de la valeur du compteur pour contrÃīler la largeur dâimpulsion dâun signal PWM qui va commander en rotation un servomoteur de modÃĐlisme :
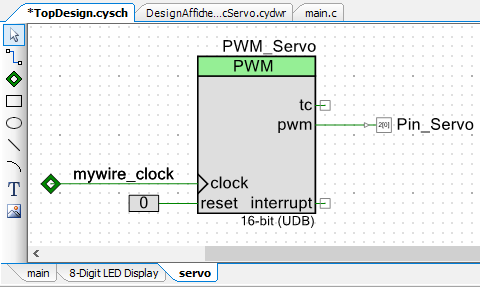
Commande de servomoteur avec une glissiÃĻre sensitive CapSense
IX. Conclusion▲
Autour de sa technologie, Cypress propose des kits et des outils de dÃĐveloppement. Ce tutoriel vous a montrÃĐ comment mettre en Åuvre rapidement un widget sensitif de type ÂŦ glissiÃĻre Âŧ (slider) sur une carte PSoC 4 dans lâEDI PSoC Creator. Le procÃĐdÃĐ SmartSense dâauto-tuning facilite le dÃĐveloppement et la mise au point en ajustant automatiquement les paramÃĻtres du capteur et du firmware afin dâoptimiser le rapport signal-bruit en toutes circonstances et ÃĐviter ainsi la dÃĐtection de ÂŦ fausses touches Âŧ.
La solution CapSense de dÃĐtection capacitive trouve des utilisations dans une grande variÃĐtÃĐ dâapplications et de produits : ÃĐlectromÃĐnager, domotique, automobile, Internet des Objets, industrie, etc. Les boutons mÃĐcaniques classiques sont alors remplacÃĐs par des interfaces utilisateurs ergonomiques et changent la façon dâinteragir avec les objets ÃĐlectroniques.
Enfin, si Arduino reste votre plateforme favorite, le module Grove - Capacitive Touch Slide Sensor offre une solution intÃĐressante avec sa glissiÃĻre axiale et ses deux boutons sensitifs.

Au dos de ce module sur la photo, une puce CY8C4014LQI, un processeur PSoCÂ 4 de CypressâĶ
Pour finir, je remercie Vincent PETIT et ClaudeLELOUP pour leur travail de relecture.